

§14. Теорема Мейсена.
Назначение: Определение передаточной функции между двумя переменными структурной схемы или графа. Является альтернативой методу структурных преобразований.
Терминология:
Путь – это направленная последовательность звеньев, в которой ни одна переменная не встречается ни одного раза.
Контур – это замкнутый путь. Передача пути (контура) – произведение передач всех звеньев встречающихся на этом пути (в этом контуре), с учетом знаков в сумматорах.
Теорема 14.1. Передача связывающая входную
переменную
![]() с выходной
с выходной![]() определяется формулой:
определяется формулой: ,
,
где
![]() передача
передача![]() го
пути от
го
пути от![]() к
к![]()
![]()
![]()
![]() сумма
передач всех контуров
сумма
передач всех контуров
![]() сумма
произведений передач, не касающихся
друг друга контуров, взятых по два.
сумма
произведений передач, не касающихся
друг друга контуров, взятых по два.
Замечание: Говорят, что контур не касается другого или пути, если он не имеет с ним общих переменных.
![]() сумма произведений передач, не касающихся
друг друга контуров, взятых по три.
сумма произведений передач, не касающихся
друг друга контуров, взятых по три.![]() .
.
![]() сумма
передач контуров, не касающихся
сумма
передач контуров, не касающихся![]() го
пути.
го
пути.
![]() сумма
произведений передач, не касающихся
сумма
произведений передач, не касающихся![]() го
пути и друг друга, взятых по два.
го
пути и друг друга, взятых по два.
![]() сумма произведений передач, не касающихся
сумма произведений передач, не касающихся![]() го
пути и друг друга, взятых по три.
го
пути и друг друга, взятых по три.
§15. Приближенное построение лчх параллельных соединений звеньев.
А. Согласно-параллельное соединение.


Вывод: ЧПФ согласно-параллельного соединения двух звеньев в диапазоне частот, где модуль ЧПФ одного звена значительно больше ЧПФ другого, приближено равна ЧПФ звена с большим модулем. Поэтому результирующую ЛАХ параллельного соединения можно проводить по верхним (т.е. имеющим на данной частоте большую ординату) участкам ЛАХ звеньев входящих в это соединение.
Пример 15.1.
![]() ,
,![]() .
.

Результирующую ЛФХ можно построить по результирующей ЛАХ.
Б. Встречно-параллельное соединение.
 ЧПФ
встречно-параллельного соединения
приблизительно равна ЧПФ с меньшим на
данном интервале частот модулем. Причём
вместо ЧПФ обратной связи необходимо
рассматривать обратную ЧПФ. Таким
образом, изображаем
ЧПФ
встречно-параллельного соединения
приблизительно равна ЧПФ с меньшим на
данном интервале частот модулем. Причём
вместо ЧПФ обратной связи необходимо
рассматривать обратную ЧПФ. Таким
образом, изображаем![]() (ЛАХ прямой связи) и
(ЛАХ прямой связи) и![]() (ЛАХ симметрична
(ЛАХ симметрична![]() относительно оси частот
относительно оси частот![]() ).
После чего результирующую ЛАХ проводим
по нижним участкам этих характеристик.
).
После чего результирующую ЛАХ проводим
по нижним участкам этих характеристик.
Пример 15.2.


Передаточная функция по результирующей
ЛАХ:
![]() .
.
Точная передаточная функция по структурной схеме:
Итак, при согласном соединении ЛАХ
проводим по верхним участкам
![]() и
и![]() .
А при встречном по нижним участкам
.
А при встречном по нижним участкам![]() и
и![]() .
.
Предостережение: Этот метод не рекомендуется использовать, если исходные ЛАХ имеют резонансные всплески и провалы.
§16. Математические модели динамических систем в форме переменных состояния.
В отличие от статических (без инерционных)
систем, динамических (инерционных)
систем реакция
![]() в данный момент времени
в данный момент времени![]() зависит не только от значения входа
зависит не только от значения входа![]() в момент
в момент![]() ,
но и от начального условия, т.е. “начального
состояния”, определимого всей
предысторией входного воздействия на
интервале
,
но и от начального условия, т.е. “начального
состояния”, определимого всей
предысторией входного воздействия на
интервале![]() .
.
Пусть динамическая система имеет
![]() входных переменных и
входных переменных и![]() выходных, а также
выходных, а также![]() “внутренних” переменных.
“внутренних” переменных.
Определение 16.1. Переменные
![]() ,
,![]() переменные состояния, если задав их
значения
переменные состояния, если задав их
значения![]() ,
,![]() в момент
в момент![]() и закон изменения входных переменных
и закон изменения входных переменных![]() на интервале
на интервале![]() можно однозначно определить значения
можно однозначно определить значения![]() ;
для всех
;
для всех![]() в момент
в момент![]() .
.
Переменные
![]() характеризуют
начальное состояние системы.
характеризуют
начальное состояние системы.
Определим вектора:
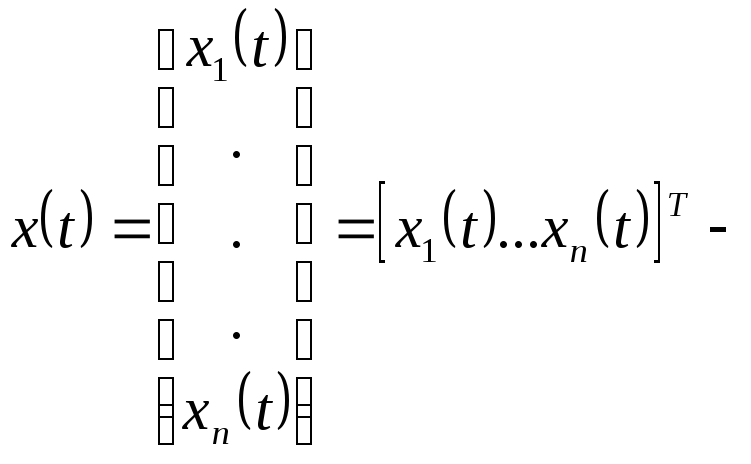 вектор
переменных состояния, вектор состояния.
вектор
переменных состояния, вектор состояния.
![]() вектор
входных переменных.
вектор
входных переменных.
![]() вектор
выходных переменных.
вектор
выходных переменных.
Определение 16.2. Множество всех значений
![]() ,
называется пространством состояний
или фазовым пространством
,
называется пространством состояний
или фазовым пространством![]() .
.![]() .
.
Определение 16.3. Пара
![]() событие,
а множество всех таких пар
событие,
а множество всех таких пар![]() .
.![]() называется
пространством событий.
называется
пространством событий.
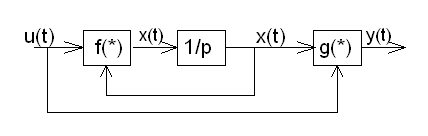
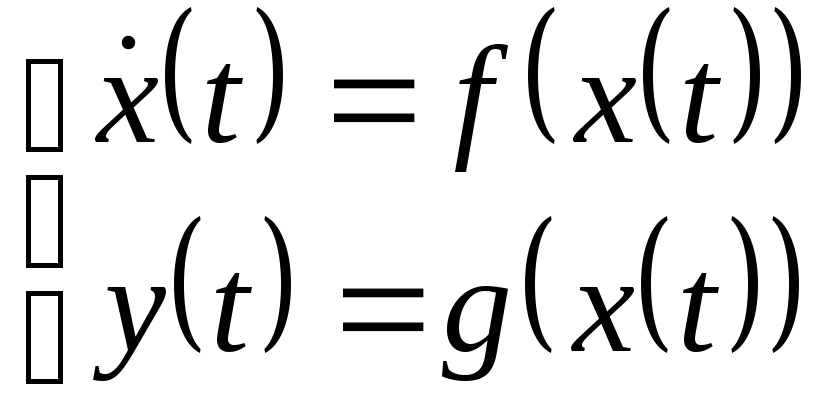
Определение 16.4. Уравнение вида:

называются уравнениями в форме переменных состояния. Причем дифференциальные уравнения (16.1) называются уравнениями состояния, а алгебраические уравнения (16.2) – уравнения выхода.

где вектор функции:

Изобразим Детализированную Структурную Схему.
Определение 16.5. Если в уравнениях (16.3)
и (16.4) правая часть не зависит от
![]() ,
то система называется стационарной.
,
то система называется стационарной.
Определение 16.6. Если в уравнениях (16.3)
и (16.4)
![]() ,
то система называется свободной.
,
то система называется свободной.
Определение 16.7. Свободная стационарная система называется автономной.
Если
![]() и
и![]() линейны, то уравнения принимают вид:
линейны, то уравнения принимают вид:

Для стационарной системы матрицы
![]() постоянны.
постоянны.

![]() матрица
системы.
матрица
системы.
![]() матрица
входа.
матрица
входа.
![]() матрица
выхода.
матрица
выхода.
![]() матрица
обхода.
матрица
обхода.