

Вариант практической цели управления.
![]() для всех
для всех![]() (1.2)
(1.2)
где
![]() заданы.
заданы.
Представим систему в следующем виде:
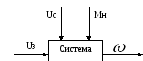
Uз,Uc, Мн – выходные воздействия. Они делятся на две принципиально различающиеся группы:
Uз – задающее воздействие (полезное).
Uc, Мн – возмущающие воздействия (их изменения приводят к отличию
 от
от ).
). управляемая
переменная является выходной величиной
(суммой реакций на все выходные величины).
управляемая
переменная является выходной величиной
(суммой реакций на все выходные величины).
§2 Статические свойства сау. (Проблема точности). Основные принципы ау. Общая структура сау.
Часть системы, на которую воздействует регулятор Р(УУ) назовём обобщённым объектом управления (ООУ). ООУ = УПУ+ИД+ОУ.

![]() реакция
(
реакция
(![]() реакций
наUз, Uс,
Мн).
реакций
наUз, Uс,
Мн).
![]() свободная
(переходная) составляющая.
свободная
(переходная) составляющая.
![]() вынужденная
составляющая (устанавливающая реакция).
вынужденная
составляющая (устанавливающая реакция).
![]() (2.1)
(2.1)
Пусть ООУ – асимптотически устойчив,
т.е. способен возвращаться в состояние
равновесия после исчезновения возмущения
выведшего его из этого состояния. Тогда
![]() ,
при
,
при![]() затухает.
затухает.
![]() ,
при
,
при![]() останется.
останется.
Будем считать, что
![]() Его изображением и колебанием пренебрегаем.
Выясним, как установившееся значение
Его изображением и колебанием пренебрегаем.
Выясним, как установившееся значение![]() зависит от различных, но постоянных
значенийUуиМн.
Для этого рассмотрим уравнение ООУ в
установившемся режиме (без обоснований).
зависит от различных, но постоянных
значенийUуиМн.
Для этого рассмотрим уравнение ООУ в
установившемся режиме (без обоснований).
![]() (2.2)
(2.2)
где
![]() постоянные
коэффициенты, причём
постоянные
коэффициенты, причём![]() (пропорционально).
(пропорционально).
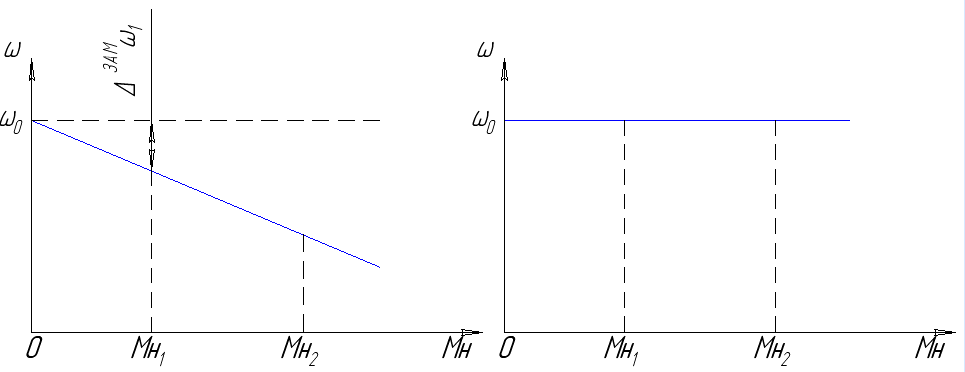
Зависимость установившегося значения выхода от постоянного входа называется статической характеристикой.
1.
![]()
![]() (2.3)
(2.3)
2.
![]() /
наброс нагрузки
/
наброс нагрузки
![]() (2.4.а)
(2.4.а)
Если
![]()
то
![]() (2.4.б)
(2.4.б)
Статическая характеристика (ООУ) по уравнению (2.2)
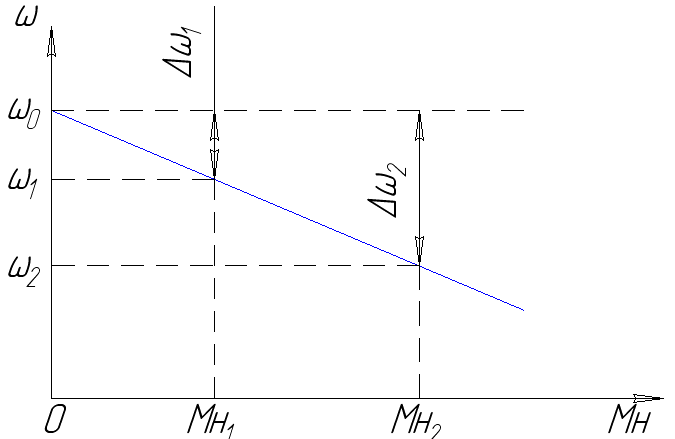
Пусть
![]() тогда на основании (2.4)
тогда на основании (2.4)![]() (2.5)
(2.5)
где
![]() (2.6)
(2.6)
ошибка поддержания скорости в разомкнутой системе, возникающая от возмущения Мн.
Чтобы скомпенсировать отклонение
![]() от
от![]() необходимо иначе построить систему, а
именно так, чтобы при уменьшении
необходимо иначе построить систему, а
именно так, чтобы при уменьшении![]() в системе автоматически изменялось
значениеUу(смотри
уравнение (2.2)) где
в системе автоматически изменялось
значениеUу(смотри
уравнение (2.2)) где![]() зависит не только отМн, но и отUу).
С этой целью вводится обратная связь
(ОС) по скорости (штриховая линия на
Рис.1.1) используется тахогенератор (ТГ)
– измерительU. Система
с обратной связью – замкнутая. Система
без обратной связи – разомкнута.
зависит не только отМн, но и отUу).
С этой целью вводится обратная связь
(ОС) по скорости (штриховая линия на
Рис.1.1) используется тахогенератор (ТГ)
– измерительU. Система
с обратной связью – замкнутая. Система
без обратной связи – разомкнута.
ОУ на схеме выполняет функцию не только регулятора, но и устройства сравнения. В ОУ Uз сравнивается с сигналом обратной связи (Uос). Обратная связь в данной системе является отрицательной. ЗнакиUз иUос противоположны.
![]()
![]() - знак не учитывается.
- знак не учитывается.
Пусть
![]() и обозначим
и обозначим![]() тогда с учётом различия знаковUз
иUос можем записать:
тогда с учётом различия знаковUз
иUос можем записать:![]() (2.7)
(2.7)
Уравнение обратной связи:
![]() (2.8)
(2.8)
Из (2.7) и (2.8) получаем выражение для закона
управления:
![]() (2.9)
(2.9)
где
![]() (2.10)
(2.10)
![]() ошибка
системы.
ошибка
системы.
На основании уравнений (2.2), (2.9), (2.10) запишем уравнение замкнутой системы:
![]()
![]() (2.11)
(2.11)
![]()
![]() (2.12)
(2.12)
![]() установившаяся
ошибка поддержания скорости в замкнутой
системе.
установившаяся
ошибка поддержания скорости в замкнутой
системе.
Из уравнения (2.12) и (2.6) имеем:
![]() (2.13)
(2.13)
где
![]() контурный
коэффициент усиления или коэффициент
передачи разомкнутой системы. Согласно
(2.13) установившаяся ошибка в замкнутой
системе меньше установившейся ошибки
разомкнутой системы в
контурный
коэффициент усиления или коэффициент
передачи разомкнутой системы. Согласно
(2.13) установившаяся ошибка в замкнутой
системе меньше установившейся ошибки
разомкнутой системы в![]() раз. В уравнении (2.11) коэффициент приUу
– коэффициент передачи замкнутой
системы по заданному воздействию.
Коэффициент при Мн – коэффициент по
возмущающемуся воздействию.
раз. В уравнении (2.11) коэффициент приUу
– коэффициент передачи замкнутой
системы по заданному воздействию.
Коэффициент при Мн – коэффициент по
возмущающемуся воздействию.
Система, в которой установившаяся (статическая) ошибка от постоянного воздействия не равна 0, а конкретно постоянна и пропорциональна этому воздействию, является статической. Если = 0, то это астатическая система.
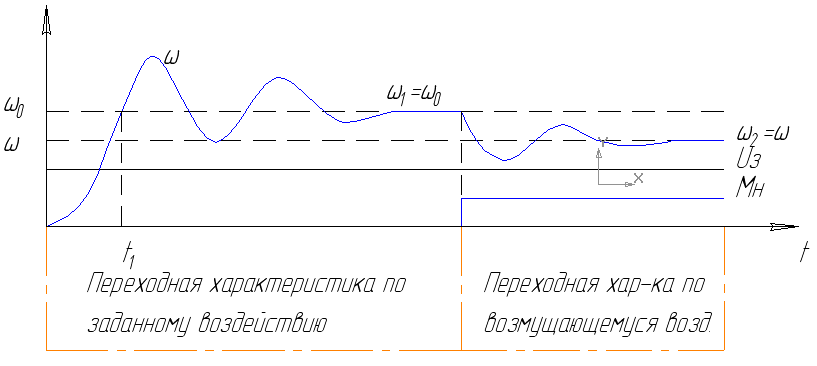
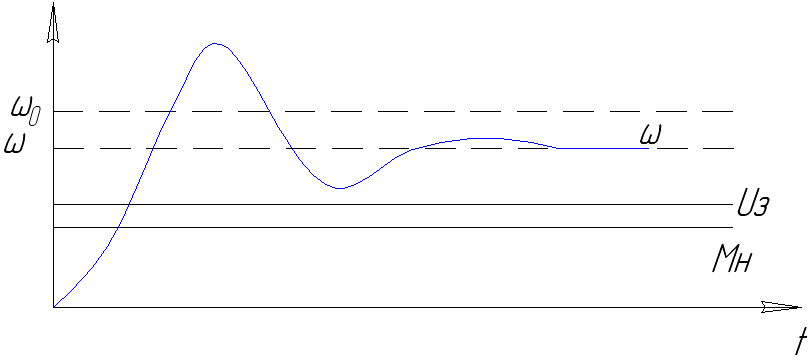
Возможные варианты переходных процессов в статической системе.

Обратная связь в этой и в большинстве существующих систем отрицательна.
Произведение передаточных функций всех звеньев в контуре имеет знак (-).
По окончании переходного процесса знаки
 и
и противоположны.
противоположны.
Рассмотрим первый переходный процесс.
![]() переходит к значению
переходит к значению![]() благодаря отрицательной обратной связи:
благодаря отрицательной обратной связи:
В исходном состоянии
![]() эквивалентно
эквивалентно![]() и
и![]() (неподвижное
состояние). При подаче
(неподвижное
состояние). При подаче![]() возникает ошибка
возникает ошибка![]() и на выходе регулятора (Р) появляется
напряжение
и на выходе регулятора (Р) появляется
напряжение![]() .
Напряжение на двигателе
.
Напряжение на двигателе![]() ,
следовательно, двигатель разгоняется.
В момент
,
следовательно, двигатель разгоняется.
В момент![]() ,
но двигатель по инерции превышает это
значение, т.е. проходит эту точку.
Поскольку
,
но двигатель по инерции превышает это
значение, т.е. проходит эту точку.
Поскольку![]() ,
то
,
то![]() ,
следовательно, двигатель тормозится и
так далее.
,
следовательно, двигатель тормозится и
так далее.
Аналогичные процессы происходят при наброске нагрузки. Отрицательная обратная связь реализует важнейший принцип АУ – принцип регулирования по отклонению. Другой принцип используемый САУ – принцип регулирования по возмущению или по внешнему воздействию.
Зависимость вида:
![]() регулирование
по отклонению
(2.14)
регулирование
по отклонению
(2.14)
где
![]() ,
,![]() задающее
воздействие,
задающее
воздействие,![]() управляемая
переменная.
управляемая
переменная.
Или
![]() регулирование
по внешнему воздействию
(2.15)
регулирование
по внешнему воздействию
(2.15)
где
![]() возмущение.
Называется законом управления.
возмущение.
Называется законом управления.
Если удается, например, измерить
![]() ,
то можно использовать эту информацию
для компенсации влияния
,
то можно использовать эту информацию
для компенсации влияния![]() на
на![]() .
.