

С короткозамкнутым ротором
Для реверсирования двигателя необходимо нажать стоповую кнопку SB1, а затем SB3, что приводит к отключению контактора КМ1 и включению контактора КМ2. В результате, как видно из схемы, переключаются две фазы на статоре электродвигателя.
Во избежание короткого замыкания в цепи статора вследствие ошибочного одновременного нажатия на обе пусковые кнопки (SB2 и SB3) реверсивные магнитные пускатели снабжены механической блокировкой в виде рычажной системы, препятствующей перемещению подвижной части одного контактора, если включен другой. Взаимная блокировка часто осуществляется с помощью размыкающих блок-контактов КМ1:5, КМ2:5 контакторов, что также исключает возможность их одновременного включения. Возможен вариант взаимной электрической блокировки посредством дополнительных размыкающих контактов пусковых кнопок SB2, SB3 вместо размыкающих блок-контактов контакторов.
1.7. Основные принципы построения систем реостатного ступенчатого пуска и торможения электроприводов
На рис. 1.7 изображены
графики изменения скорости
и тока
во времени при реостатном пуске
асинхронных двигателей и двигателей
постоянного тока с тремя ступенями
пускового резистора. Из графиков следует,
что автоматическое выключение ступеней
пускового реостата должно происходить
в определенные моменты времени
![]() при определенных скоростях (1,
2,
3)
и определенной величине тока
при определенных скоростях (1,
2,
3)
и определенной величине тока
![]() .
.
Соответственно, управление пуском может осуществляться по принципам времени, скорости и тока.
При пуске по времени
специальные аппараты (реле времени) в
заданные моменты
![]() подают команды на выведение ступеней
пускового реостата.
подают команды на выведение ступеней
пускового реостата.
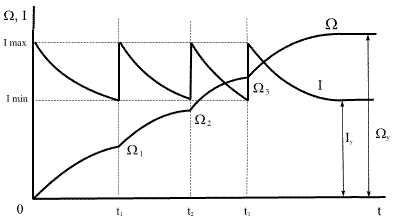
Рис. 1.7. Графики изменения скорости и тока
При реостатном ступенчатом пуске электродвигателей
Принципы скорости и тока предполагают контроль соответствующих переменных (, ), при заданных значениях которых соответствующие аппараты подают команды на выведение ступеней реостата.
Иногда используют
комбинированные методы пуска, например,
по времени с коррекцией по току: если к
определенному моменту времени, например,
![]() ,
ток превышает значение
,
ток превышает значение
![]() ,
выведение очередной ступени реостата
задерживается на время, необходимое
для снижения тока до величины
,
и очередное переключение в схеме
производится уже по команде реле тока,
а не времени.
,
выведение очередной ступени реостата
задерживается на время, необходимое
для снижения тока до величины
,
и очередное переключение в схеме
производится уже по команде реле тока,
а не времени.
1.8. Типовые узлы и схемы реостатного ступенчатого пуска и торможения электродвигателей, работающие по принципу времени
Реализуются с использованием реле времени, устройство, принцип действия и характеристики которых изучались в курсе “Электрические и электронные аппараты”. Необходимые выдержки времени для каждого реле определяются на основании расчета переходного процесса при пуске или торможении электродвигателя. По принципу времени работают типовые узлы электрических схем, представленные на рис. 1.8 и 1.9.
На рис. 1.8 показана упрощенная схема управления асинхронным электродвигателем с фазным ротором, обеспечивающая пуск с одной ступенью реостата в роторной цепи. Схема управления содержит пусковую SB1 и стоповую SB2 кнопки, контакторы КМ0, КМ1 и реле времени КТ.
В исходном состоянии КМ0, КМ1, КТ обесточены, двигатель М неподвижен.
При нажатии кнопки SB1 получают питание катушка контактора КМ0, который, срабатывая, силовыми контактами КМ0:1 ‑ КМ0:3 подключает к сети статор электродвигателя при введенных в ротор пусковых резисторах R1 ‑ R3, блок-контактом КМ0:4 шунтирует пусковую кнопку, и она может быть отпущена, блок-контактом КМ0:5 включает реле времени КТ. Электродвигатель запускается на реостатной характеристике 1.
По истечении выдержки времени t1, реле времени замыкающим контактом КТ подключает к источнику питания катушку контактора КМ1, который контактами КМ1:1, КМ1:2 закорачивает цепь ротора, и электродвигатель переходит на естественную характеристику 2.
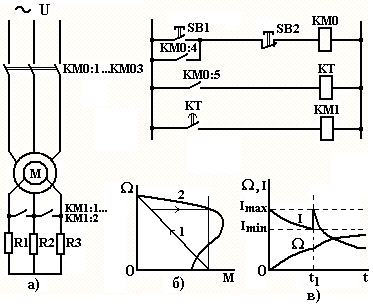
Рис. 1.8. Реостатный пуск асинхронного электродвигателя