

2.2.2. С тиристорными ключевыми элементами в цепи ротора
асинхронного электродвигателя (рис. 2.5)
а) б) в)
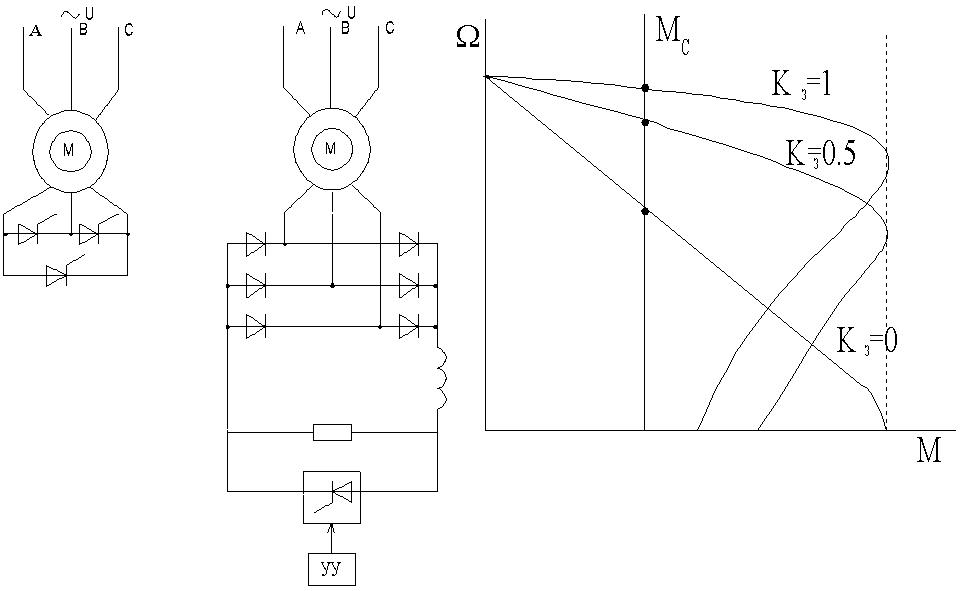
Рис. 2.5. Асинхронный электропривод с тиристорными
ключевыми элементами в цепи ротора:
а) с естественной коммутацией; б) с искусственной коммутацией;
в) механические характеристики двигателя при различных
значениях коэффициента заполнения Кз
В схеме 2.5, а) с изменением угла регулирования плавно изменяется величина сопротивление роторной цепи, а следовательно, и скорость электродвигателя. В схеме 2.5, б) тот же эффект достигается периодическим с большой частотой шунтированием резистора R в роторной цепи электродвигателя тиристорным ключевым элементом S с регулируемым соотношением времени включенного и выключенного состояний. Схема требует принудительного запирания тиристорного ключа, т.е. искусственной коммутации. Дроссель L служит для сглаживания пульсаций роторного тока.
Вид механических характеристик электродвигателя при различных значениях коэффициента заполнения для этой схемы показан на рис.2.5, в).
С уменьшением коэффициента заполнения характеристики смягчаются, но перегрузочная способность электродвигателя сохраняется. Регулирование сопровождается потерями энергии в реостате R.
2.2.3. С частотным регулированием асинхронных и синхронных электродвигателей (рис. 2.6)
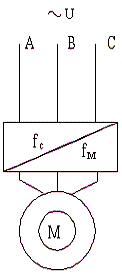
Рис. 2.6. Подключение асинхронного электродвигателя через
Преобразователь частоты
Статор электродвигателя подключается к сети через преобразователь частоты ПЧ, преобразующий напряжение сетевой частоты fс в напряжение регулируемой частоты fм, поступающее на статорные обмотки электродвигателя.
Применяют три основных варианта ПЧ:
непосредственные (без звена постоянного тока);
c явно выраженным звеном постоянного тока;
c неявно выраженным звеном постоянного тока.
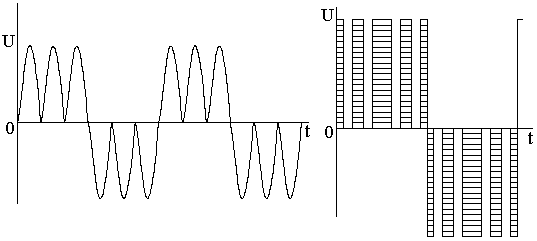
В непосредственных ПЧ регулирование осуществляется вниз от частоты сети. Принцип регулирования поясняется рисунком 2.7, а, где показана форма напряжения на одной из фаз статорной цепи электродвигателя. Регулирование частоты, как видно из рисунка, дискретное.
Преобразователь частоты с явно выраженным звеном постоянного тока состоит из двух тиристорных преобразователей: управляемого выпрямителя и автономного инвертора. Частота fм напряжения, питающего электродвигатель, может регулироваться как вверх, так и вниз от частоты сети fс.
Простейший инвертор формирует три напряжения прямоугольной формы, сдвинутые по фазе на треть периода. Такое напряжение содержит большой спектр гармоник, которые ухудшают режим работы электродвигателя.
а) б)
Рис. 2.7. Форма напряжения на одной из фаз статора:
а – при питании от непосредственного ПЧ;
б – при питании от ПЧ с промежуточным звеном постоянного
Тока и широтно-импульсной модуляцией.
Для уменьшения этого фактора в более сложных схемах инверторов используют высокочастотную широтно-импульсную модуляцию выходного напряжения, как показано на рисунке 2.7, б с использованием дополнительных узлов искусственной коммутации.
Частотное регулирование в таких ПЧ позволяет получить широкий диапазон плавного и экономичного регулирования скорости, но требует одновременного изменения уровня выходного напряжения инвертора по закону:
U2
/ U1
= f2
/ f1
![]() ,
,
где М2,
М1
– моменты электродвигателя при частотах
![]() и
и
![]() .
.
Из этой формулы следует, что при регулировании электродвигателя с постоянным моментом (М2=М1) при изменении частоты должна пропорционально изменяться величина напряжения на выходе выпрямителя ПЧ:
U2 / U1 = f2 / f1.
В инверторах с неявно выраженным звеном постоянного тока ряд силовых элементов схемы совмещает функции выпрямления и инвертирования напряжения.
Недостаток тиристорных ПЧ – сложность и дороговизна преобразователя.