

1.2. Типовые узлы статорных цепей, обеспечивающие пуск асинхронных и синхронных электродвигателей
Асинхронные электродвигатели с короткозамкнутым ротором выпускаются на напряжения 220–6000В и мощности примерно 0,6–1000 кВт. Если питающая сеть и двигатель допускают прямое включение на полное напряжение, то обычно осуществляется прямой пуск подключением статора к питающей сети. В противном случае предусматривают ограничение тока и момента при пуске введением в цепь статора пускового резистора, дросселя или автотрансформатора (рис. 1.1, а, б).
При первом варианте
пуска электродвигателя используют два
коммутационных аппарата
![]() .
Вначале включается
.
Вначале включается
![]() ,
и двигатель разгоняется с введенными
в каждую фазу резисторами R
или реактивными элементами (дросселями)
Z
(рис. 1.1 а). На втором этапе включается
,
и двигатель разгоняется с введенными
в каждую фазу резисторами R
или реактивными элементами (дросселями)
Z
(рис. 1.1 а). На втором этапе включается
![]() ,
шунтирующий ограничивающие элементы.
,
шунтирующий ограничивающие элементы.
Если снижение пускового момента нежелательно, может быть применен автотрансформаторный пуск (рис. 1.1,б).
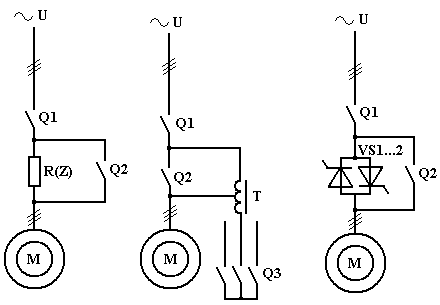
а) б) в)
Рис. 1.1. Узлы статорных цепей при пуске асинхронных
И синхронных электродвигателей
В исходном состоянии
коммутационные аппараты![]() разомкнуты, и двигатель неподвижен. В
процессе запуска вначале включают
разомкнуты, и двигатель неподвижен. В
процессе запуска вначале включают
![]() ,
а затем
,
и двигатель разгоняется на пониженном
напряжении от автотрансформатора TV.
С ростом скорости при снижении пускового
тока выключатель
размыкается, и разгон продолжается с
добавочными дросселями в цепи статора,
функции которых выполняют части обмоток
автотрансформатора.
,
а затем
,
и двигатель разгоняется на пониженном
напряжении от автотрансформатора TV.
С ростом скорости при снижении пускового
тока выключатель
размыкается, и разгон продолжается с
добавочными дросселями в цепи статора,
функции которых выполняют части обмоток
автотрансформатора.
Синхронные электродвигатели выпускаются на напряжения 220–10500 В и мощности 50–15000 кВт. Они обычно имеют на роторе дополнительную пусковую обмотку типа беличьей клетки, и их пуск осуществляется так же, как и асинхронных электродвигателей с короткозамкнутым ротором.
1.3. Узлы роторных цепей асинхронных электродвигателей
Наибольшее применение получила схема, приведенная на рис. 1.2. Она удобна в монтаже, требует минимального количества контактов. Число пусковых ступеней – до 5…7.

Рисунок 1.2 – Вариант включения пусковых резисторов в цепь
Ротора асинхронного электродвигателя
1.4. Узлы роторных цепей синхронных электродвигателей
В синхронных
электродвигателях (рис.1.3) ротор (индуктор)
получает питание от источника постоянного
тока (электромашинного возбудителя,
генератора постоянного тока с независимым
возбуждением или от выпрямителя). При
легких условиях запуска (![]() <
0,4
<
0,4![]() )
осуществляют запуск с глухо подключенным
возбудителем G,
соединенным с валом синхронного
электродвигателя М.
)
осуществляют запуск с глухо подключенным
возбудителем G,
соединенным с валом синхронного
электродвигателя М.
Сопротивление
резистора
![]() в цепи обмотки возбуждения LG
возбудителя подбирают таким, чтобы для
уменьшения броска тока в статоре при
входе электродвигателя в синхронизм
самовозбуждение происходило при
скорости, близкой к синхронной.
в цепи обмотки возбуждения LG
возбудителя подбирают таким, чтобы для
уменьшения броска тока в статоре при
входе электродвигателя в синхронизм
самовозбуждение происходило при
скорости, близкой к синхронной.
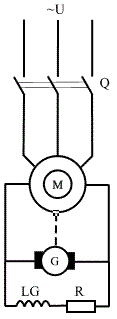
Рис. 1.3. Схема пуска синхронного электродвигателя
С глухо подключенным возбудителем
При более тяжелых условиях пуска управление подачей напряжения в цепь ротора осуществляется после снижения до определенной величины тока статора. Пример такой схемы будет рассмотрен позднее.