

2.2.5. С питанием электродвигателя от источника тока
В ряде электроприводов, например, промышленных манипуляторов, требуется строгое дозирование момента, развиваемого электродвигателем. Для достижения этой цели в электроприводах постоянного тока осуществляют питание якорной цепи электродвигателя М от источника тока ИТ, а обмотки возбуждения LM - от регулируемого источника напряжения, как показано на рис. 2.9.

Рис. 2.9. Электропривод по системе источник тока – двигатель
При таком включении момент электродвигателя пропорционален магнитному потку Ф:
М=СФI = МФ,
где М = CI – коэффициент пропорциональности.
Изменяя поток Ф по величине и знаку, можно регулировать момент М как в двигательном, так и в тормозном режимах.
Механические характеристики электропривода по системе ИТ-Д показаны на рис. 2.10. В идеальном случае они абсолютно мягкие.
Достаточно просто стабилизация момента достигается применением параметрического источника тока, наиболее распространенный вариант которого показан на рис. 2.11.
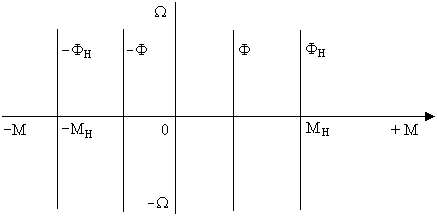
Рисунок 2.10. Механические характеристики электропривода
По системе ит - д
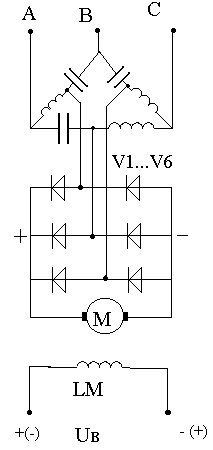
Рис. 2.11. Электропривод с параметрическим источником тока
Источник тока состоит из индуктивно-емкостного преобразователя и выпрямителя. При выборе элементов преобразователя из условия получения режима резонанса тока (ХС=ХL) схема обеспечивает практическую независимость тока нагрузки в широком диапазоне изменения противо-ЭДС вращения якоря, а, следовательно, и скорости .
Простота реализации, высокие КПД и коэффициент мощности являются преимуществами такой СУЭП.
К недостаткам следует отнести плохие весогабаритные показатели и низкое быстродействие. Поэтому такую систему применяют в электроприводах ограниченной мощности с относительно большим моментом инерции движущихся масс.
Устранить эти недостатки позволяют замкнутые СУЭП с обратной связью по моменту (току), что будет рассмотрено позднее.
2.2.6. С импульсным преобразователем в цепи постоянного тока
Широко применяется на транспортных средствах с тяговыми электродвигателями постоянного тока, в частности, на рудничных электровозах. Принцип импульсного управления поясняется рис. 2.12 а, б.
 а) б)
а) б)
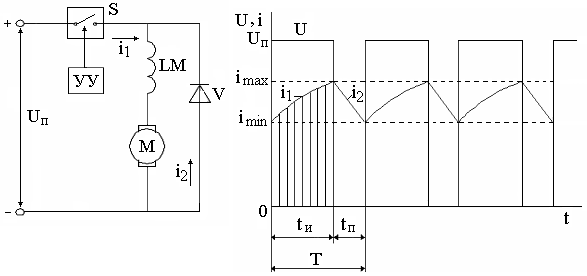
Рис. 2.12. Принцип импульсного управления электродвигателем
Постоянного тока: а) электрическая схема включения; б) графики тока и напряжения двигателя
Между электродвигателем и источником питания включают силовой тиристорный ключ, который с большой частотой замыкает и размыкает цепь питания электродвигателя.
При замкнутом
ключе в течение времени tи
к двигателю приложено полное напряжение
источника питания, и ток двигателя
![]() постепенно, благодаря индуктивности
якорной цепи, нарастает от
до
.
постепенно, благодаря индуктивности
якорной цепи, нарастает от
до
.
При размыкании ключа двигатель отключается от источника питания, а под действием ЭДС самоиндукции якорной цепи ток двигателя постепенно спадает до , замыкаясь через цепь диода V.
Среднее значение напряжения на электродвигателе:
Uср
=![]() ,
,
где Кз =tи / T – коэффициент заполнения.
Изменение коэффициента заполнения К3 от 0 до 1 позволяет плавно и экономично регулировать величину напряжения Uср, а, следовательно, и скорость электродвигателя:
(Uср - ср·Rэ )/ CФ ,
где ср
– среднее значение тока якоря; Rэ
‑ сопротивление якорной цепи;
![]() – конструктивная постоянная
электродвигателя; Ф – магнитный поток,
создаваемый обмоткой возбуждения.
– конструктивная постоянная
электродвигателя; Ф – магнитный поток,
создаваемый обмоткой возбуждения.
Известны сотни вариантов тиристорных импульсных преобразователе (ТИП). Один из них показан на рисунке 2.13, где V1 – силовой тиристор, V2 – вспомогательный запирающий тиристор, C – коммутирующий конденсатор, V3, L – перезарядные диод и дроссель.
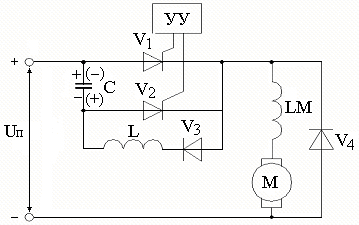
Рис. 2.13. Вариант схемной реализации ТИП
Работает схема следующим образом. Отпирается вспомогательный тиристор V2 от устройства управления УУ, и конденсатор C заряжается от источника питания через цепь нагрузки (электродвигатель) в полярности, указанной на рисунке без скобок. При заряде ток уменьшается до нуля, и тиристор V2 запирается (естественная коммутация).
Затем включается силовой тиристор V1, и напряжение питания поступает на электродвигатель. Одновременно происходит резонансный перезаряд конденсатора через V1, V3, L почти до исходного напряжения в полярности, указанной на рисунке в скобках.
Для выключения силового тиристора V1 снова отпирается V2. Напряжение конденсатора C прикладывается к V1 в запирающей полярности и он принудительно запирается, а конденсатор заряжается до исходного напряжения через цепь нагрузки. Далее процесс периодически повторяется.
Изменение среднего значения напряжения на электродвигателе, а следовательно, и его скорости вращения осуществляется путем регулируемого сдвига моментов отпирания вспомогательного тиристора V2 по отношению к моментам включения силового тиристора V1.
Так как тиристорный ключ работает в цепи постоянного тока, для его запирания требуется узел искусственной коммутации, что усложняет устройство и снижает надежность его работы. Поэтому в последнее время в системах управления электроприводов находят широкое применение полностью управляемые ключевые элементы на силовых транзисторах.
В качестве примера на рис. 2.14 приведен вариант устройства импульсного регулирования угловой скорости электродвигателя постоянного тока с независимым возбуждением в двигательном и тормозном режимах при питании от обратимого источника, например, аккумуляторной батареи. В двигательном режиме функции силового ключа S (см. рис. 2.12) выполняет транзистор VT2, а обратного диода – вентиль VD1.
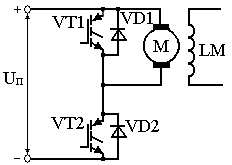
Рис. 2.14. Электропривод с импульсным регулированием скорости