

2.2.4. С вентильным преобразователем в якорной цепи электродвигателя постоянного тока
Нереверсивные и реверсивные электроприводы по системе “Вентильный преобразователь – двигатель постоянного тока”, называемые вентильными, нашли широкое применение в промышленности. В них возможно плавное и экономичное регулирование угловой скорости в широких пределах изменением напряжения питания якорной цепи электродвигателя.
В качестве преобразователей наибольшее распространение получили мостовые схемы выпрямления (одно- и трехфазные). В нереверсивных электроприводах для упрощения и удешевления часто используют полууправляемые мосты с заменой половины тиристоров диодами.
В реверсивных электроприводов применяют три варианта изменения направления момента и скорости:
изменением направления тока в цепи якоря с помощью переключателя (реверсора). Применяется, когда допустима продолжительность паузы при реверсе до 0,1…0,2 с.;
изменением направления тока в цепи якоря двигателя с помощью двух вентильных групп, обеспечивающих противоположную полярность напряжения на его зажимах (рисунок 2.8). Применяется в быстродействующих электроприводах;
изменением направления тока в обмотке возбуждения. Этот вариант проще и дешевле предыдущих, но уступает им по быстродействию; продолжительность реверса достигает 0,5…2,5 с из-за большой электромагнитной постоянной времени обмотки возбуждения.
Реверсивные вентильные преобразователи подразделяются на однокомплектные (с контактным реверсом или же выполненные на симметричных тиристорах) и двухкомплектные (рисунок 2.8).
В двухкомплектных преобразователях применяют раздельное и совместное управление вентильными группами. В первом случае отпирающие импульсы подают на вентили одной либо другой группы. Переключение производится в бестоковую паузу, что фиксируется с помощью датчика тока. Часто, особенно в маломощных приводах из экономических соображений используют общее устройство импульсно-фазового управления для обеих вентильных групп с бесконтактным переключателем импульсов.
При совместном управлении отпирающие импульсы подаются на обе группы вентилей, одна из которых работает в выпрямительном режиме, а другая – в режиме инвертирования. При этом возникает уравнительный ток, который замыкается внутри выпрямительной и инверторной групп вентилей, минуя якорную цепь двигателя. Ограничение этого тока на уровне примерно 0,1 от номинального осуществляется с помощью реактора (дросселя) с соответствующей величиной индуктивного сопротивления.
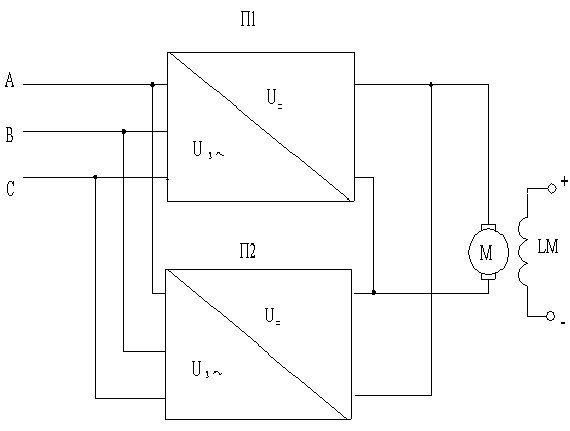
Рис. 2.8. Вентильный электропривод с двухкомплектным
Преобразователем
В современных реверсивных вентильных электроприводах в основном применяют однокомплектные преобразователи с контактным реверсом по цепи якоря или же двухкомплектные с раздельным управлением вентильными группами. Совместное управление применяется только в специальных приводах, например, работающих в области малых нагрузок с частыми изменениями направления тока в якорной цепи двигателя.
На практике помимо электроприводов с однозонным регулированием скорости (вниз от номинальной) изменением напряжения питания якорной цепи, находят применение электроприводы с двухзонным регулированием. В них после достижения полного напряжения на зажимах якоря дальнейшее повышение угловой скорости осуществляется ослаблением поля (уменьшением тока возбуждения). Для этой цели питание независимой обмотки возбуждения двигателя производится от отдельного управляемого выпрямителя.