

В двигательном и тормозном режимах
В режиме
рекуперативного торможения транзистор
VT2
закрыт, а в регулировании принимают
участие транзистор VT1
и диод VD2.
При отпирании транзистора VT1
под действием противо-ЭДС вращения
якоря происходит рост тока якорной цепи
M
электродвигателя до некоторого
установленного порогового значения
![]() ,
после чего транзистор VT1
переводится в закрытое (непроводящее)
состояние. При этом под действием
суммарной ЭДС самоиндукции и вращения
ток якоря, постепенно уменьшаясь до
некоторого минимального значения
,
протекает через источник питания Uп
и диод VD2.
Затем снова отпирается транзистор VT1,
и процесс повторяется. По мере снижения
угловой скорости, а, следовательно и
противо-ЭДС вращения якоря для поддержания
средней величины тормозного тока
постепенно увеличивают продолжительность
замкнутого состояния транзистора VT1,
обеспечивая режим рекуперативного
торможения при изменении угловой
скорости в широком диапазоне, практически
до полной остановки двигателя.
,
после чего транзистор VT1
переводится в закрытое (непроводящее)
состояние. При этом под действием
суммарной ЭДС самоиндукции и вращения
ток якоря, постепенно уменьшаясь до
некоторого минимального значения
,
протекает через источник питания Uп
и диод VD2.
Затем снова отпирается транзистор VT1,
и процесс повторяется. По мере снижения
угловой скорости, а, следовательно и
противо-ЭДС вращения якоря для поддержания
средней величины тормозного тока
постепенно увеличивают продолжительность
замкнутого состояния транзистора VT1,
обеспечивая режим рекуперативного
торможения при изменении угловой
скорости в широком диапазоне, практически
до полной остановки двигателя.
3. Замкнутые суэп постоянного тока с общим суммирующим регулятором
3.1. Общие сведения
При управлении электроприводами возникает задача поддержания постоянных значений переменных, характеризующих режим работы электродвигателей (момент, ток, скорость). Для решения ее применяют замкнутые СУЭП (с обратными связями), работающие по принципу отклонения.
С целью повышения быстродействия и точности управления в переходных режимах используют также информацию о возмущающих воздействиях, т. е. применяют принцип комбинированного управления.
Замкнутые САУ могут быть одноконтурными, т. е. с обратной связью по одной переменной (координате) и многоконтурными, с обратными связями по нескольким координатам (скорости, напряжению, току).
Применяют многоконтурные СУЭП с общим регулятором и с раздельными регуляторами по каждой переменной (системы с подчиненным регулированием, рассматриваемые в следующей теме).
Замкнутые СУЭП включают в себя: управляемый объект ‑ электродвигатель М, преобразователь П и регулятор Р.
В качестве преобразователей применяют:
а) генераторы постоянного тока (Г) и электромашинные усилители (ЭМУ);
б) магнитные усилители (система МУ ‑ Д);
в) тиристорные преобразователи (система ТП ‑ Д).
В современных регулируемых электроприводах в основном используют тиристорные и транзисторные преобразователи (управляемые выпрямители, импульсные преобразователи, преобразователи частоты).
3.2. Система стабилизации угловой скорости с несколькими
обратными связями и общим регулятором, ее свойства в статистике
Обобщенная схема системы стабилизации угловой скорости электродвигателя постоянного тока с независимым возбуждением с различными обратными связями приведена на рис. 3.1.
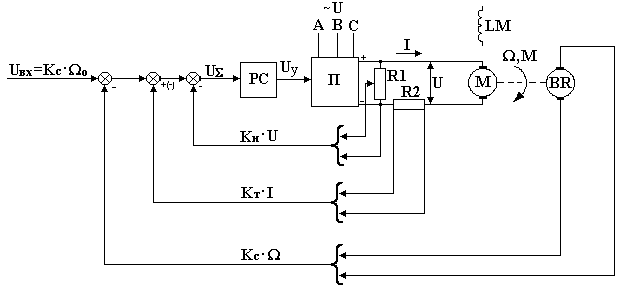 Рис.
3.1. Обобщенная схема системы стабилизации
скорости
Рис.
3.1. Обобщенная схема системы стабилизации
скорости
электродвигателя постоянного тока.
М – электродвигатель; П – управляемый преобразователь;
РС – регулятор скорости; BR – тахогенератор;
KC – статические коэффициенты усиления
задающего элемента и датчика угловой скорости;
KН, KТ – статические коэффициенты усиления датчиков
напряжения и тока
Рассматриваемая система управления ‑ трехконтурная с отрицательными обратными связями по скорости , напряжению U и с отрицательной (положительной) связью по току , с общим регулятором скорости РС. Преобразователь П в общем случае является нелинейным элементом со сложной зависимостью выходного напряжения и внутреннего сопротивления от уровня входного управляющего сигнала UУ.
Рассмотрим линеаризованную модель электропривода, полагая, что преобразователь характеризуется статистическим коэффициентом усиления КП и внутренним (выходным) сопротивлением RП, величины которых не зависят от уровня управляющего напряжения, т.е. являются постоянными. Тогда для режима статики справедлива следующая система уравнений:
![]() ;
(3.1)
;
(3.1)
![]() ; (3.2)
; (3.2)
![]() . (3.3)
. (3.3)
где КРС – статический коэффициент усиления регулятора скорости РС;
RЯ – сопротивление якорной цепи электродвигателя М;
СЕ – коэффициент пропорциональности между ЭДС вращения якоря электродвигателя ЕЯ и угловой скоростью .
Исключив промежуточные переменные UУ и U, получаем выражение для электромеханической (скоростной) характеристики электропривода =f():
ХХ – B, (3.4)
где ХХ
![]() – угловая
скорость идеального холостого хода
(при токе якоря
= 0);
– угловая
скорость идеального холостого хода
(при токе якоря
= 0);
B=
![]() – коэффициент наклона характеристики;
– коэффициент наклона характеристики;
K0 = KРС KП – общий коэффициент усиления регулятора и преобразователя.
Из уравнения (3.4) можно получить выражение электромеханической характеристики для различных частных вариантов обратных связей (полагая какие-либо из коэффициентов KС, KТ, KН равными нулю).
Так для разомкнутой системы электропривода (без обратных связей) уравнение (3.4) примет вид:
![]() ,
,
где RЭ = RП + RЯ.
Для электропривода с отрицательной обратной связью по угловой скорости и положительной (отрицательной) обратной связью по току (KН =0):
![]() (3.5)
(3.5)
Для электропривода с обратной связью по напряжению (КС=0, КТ=0):
![]() .
.
Анализируя полученные выражения =f(), можно сделать следующие выводы:
Отрицательная обратная связь по скорости, снижая величину коэффициента B, повышает жесткость характеристики; привод становится менее чувствительным к изменениям нагрузки, что уменьшает величину статистической ошибки от возмущающего воздействия (момента сопротивления на валу электродвигателя), т. е. повышает точность управления.
Положительная обратная связь по току дополнительно повышает жёсткость электромеханической характеристики привода. При определенной глубине обратной связи, когда B=0, величина тока якоря вообще не влияет на установившееся значение скорости, т.е. составляющая статической ошибки от возмущающего воздействия становится равной нулю.
Отрицательные обратные связи по напряжению и скорости уменьшают величину ХХ. Поэтому для получения заданной угловой скорости необходимо, соответственно, увеличивать напряжение UВХ задающего элемента.
Рассмотрим более подробно влияние обратных связей по скорости и току (наиболее распространенный вариант) на точность управления в статике.
Преобразуем уравнение скоростной характеристики (3.5) для этого случая.
Подставим UВХ = KС 0,
где 0 ‑ заданное значение угловой скорости.
Учтем, что 1/CЕ =КМ представляет собой статический коэффициент усиления электродвигателя и обозначим общий коэффициент усиления разомкнутой системы (по контуру угловой скорости) через K:
![]() .
.
![]() Тогда
Тогда
 .
(3.6)
.
(3.6)
Введем относительные единицы для угловой скорости и тока, приняв за базовые значения заданное значение скорости 0 и номинальный ток электродвигателя IН:
![]()
![]() .
.
Тогда уравнение (3.6) перепишется в виде:
![]() , (3.7)
, (3.7)
где ![]() – коэффициент усиления контура тока;
– коэффициент усиления контура тока;
Н
=
![]() – отношение падение напряжения в якорной
цепи электродвигателя при номинальном
токе к
ЭДС вращения якоря при заданной угловой
скорости.
– отношение падение напряжения в якорной
цепи электродвигателя при номинальном
токе к
ЭДС вращения якоря при заданной угловой
скорости.
Статическая ошибка управления:
![]() .
.
Полагая i = 1, получим коэффициент статизма, равный значению статической ошибки в долях от заданного значения угловой скорости 0 = 1, при номинальном токе якоря:
![]() (3.8)
(3.8)
где ![]() – коэффициент статизма по задающему
воздействию;
– коэффициент статизма по задающему
воздействию;
S2![]() – коэффициент статизма по возмущающему
воздействию,
– коэффициент статизма по возмущающему
воздействию,
Повысить точность управления в статике, т. е. сделать величины S1 и S2 достаточно малыми можно увеличением коэффициента усиления разомкнутой системы К. Но при этом возникает проблема устойчивости системы. При увеличении К система приближается к границе устойчивости и при некотором критическом значении К оказывается неустойчивой.
Сравним величины коэффициентов статизма по нагрузке S2 для разомкнутой и замкнутой систем электропривода.
При отсутствии обратных связей (КС=0, КТ=0):
S2 = Н, т.е. Н – это коэффициент статизма по возмущающему воздействию в разомкнутой системе электропривода.
При использовании же обратной связи по скорости, как следует из (3.8), величина статической ошибки от возмущающего воздействия снижается в 1+К раз.
Введение положительной
обратной связи по току при
![]() дополнительно снижает величину S2,
т.е. повышает точность управления в
статике.
дополнительно снижает величину S2,
т.е. повышает точность управления в
статике.
При
![]() ,
т. е. при
,
т. е. при
![]() ,
составляющая коэффициента статизма S2
становится равной нулю, следовательно
в статике полностью компенсируется
влияние нагрузки на величину угловой
скорости электродвигателя. Но, как будет
показано ниже, электропривод оказывается
при этом на границе устойчивости.
,
составляющая коэффициента статизма S2
становится равной нулю, следовательно
в статике полностью компенсируется
влияние нагрузки на величину угловой
скорости электродвигателя. Но, как будет
показано ниже, электропривод оказывается
при этом на границе устойчивости.