

3.5. Замкнутая суэп постоянного тока со стабилизацией момента
Функциональная схема такой СУЭП приведена на рис. 3.5.
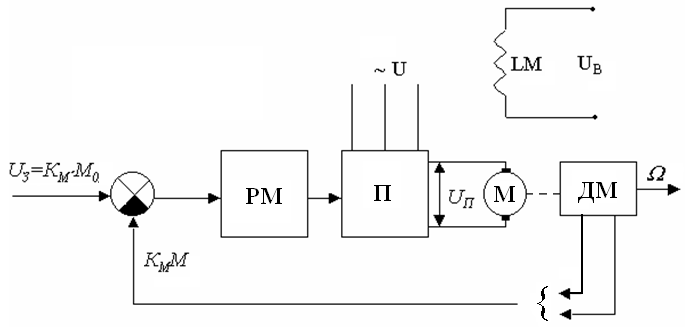
Рис. 3.5. Замкнутая СУЭП стабилизации момента.
РМ – регулятор момента; ДМ – датчик момента;
UЗ – задающее напряжение, пропорциональное заданному
Моменту м; крм – коэффициент усиления регулятора момента;
КМ – коэффициент усиления датчика момента
Уравнения, описывающие рассматриваемую СУЭП в статике:
 ; (3.23)
; (3.23)
Подставив UП из первого уравнения во второе и разрешив его относительно момента, получим выражение для механической характеристики привода:
![]() (3.24)
(3.24)
где
![]() ‑ общий коэффициент усиления
разомкнутой системы;
‑ общий коэффициент усиления
разомкнутой системы;
![]() ‑ жесткость
механической характеристики
электродвигателя.
‑ жесткость
механической характеристики
электродвигателя.
Из уравнения (3.24) следует, что введение отрицательной обратной связи по моменту снижает жесткость механической характеристики в 1+К раз, и при большом значении К характеристика становится очень мягкой, как показано на рис. 3.6,
где
![]() ‑ момент короткого замыкания (при
=0).
‑ момент короткого замыкания (при
=0).
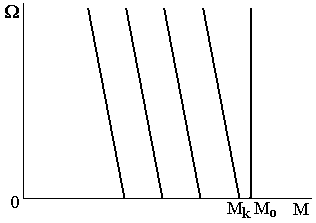
Рис. 3.6. Механические характеристики привода
С обратной связью по моменту.
Чем больше величина К, тем ближе характеристика к вертикальной М=М0=Const. Изменением задающего напряжения, а, следовательно, и величины момента короткого замыкания МК можно получить семейство механических характеристик, показанных на том же рисунке.
4. Суэп постоянного тока с подчиненным регулированием
4.1. Общие сведения
В электроприводах с несколькими обратными связями и общим регулятором трудно обеспечить качественное протекание переходных процессов, даже с использованием корректирующих устройств.
Поэтому широкое применение находят СУЭП подчиненного регулирования с раздельными регуляторами скорости РС и тока РТ, как показано на рис. 4.1.

Рис. 4.1. СУЭП постоянного тока с подчиненным регулированием
Т.к. тиристорные преобразователи требуют сравнительно маломощных управляющих сигналов, регуляторы РС и РТ легко реализуются на операционных усилителях, осуществляющих одновременно с усилением необходимые математические операции над входными электрическими сигналами.
Операционный усилитель (ОУ) ‑ это электронный усилитель с нечетным числом каскадов с большим коэффициентом усиления (1000 и более), охваченный сильной отрицательной обратной связью (ООС).
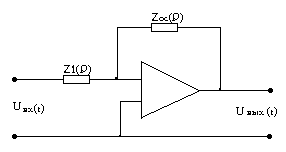
Рис. 4.2. Операционный усилитель
ОФП усилителя определяется отношением сопротивления обратной связи Zос(р) к входному сопротивлению Z1(р) в операторной форме.
В рассматриваемых электроприводах чаще всего применяют пропорциональный (П) и пропорционально-интегральный (ПИ) регуляторы.
Для получения П регулятора с коэффициентом усиления Кр на входе усилителя и в цепи обратной связи используют активные резисторы: Z1(p)=R1, Zoc(p)=Roc. Коэффициент усиления такого ОУ Kp=Roc/R1.
Для получения ПИ регулятора в цепи обратной связи включают последовательно резистор с сопротивлением Rос и конденсатор емкостью C.
В этом случае ОФП регулятора:

где ![]() – коэффициент интегральной составляющей
регулятора.
– коэффициент интегральной составляющей
регулятора.
Выражение для ОФП можно также записать в следующем виде:
 ,
,
где ![]() – постоянная интегрирования регулятора.
– постоянная интегрирования регулятора.
В общем случае система подчиненного регулирования может содержать N контуров по числу регулируемых переменных, причем каждый внутренний контур обратной связи подчинен следующему по отношению к нему внешнему контуру.
Подчиненность выражается в том, что задающим воздействием для внутреннего контура является выходная величина регулятора ближайшего внешнего контура. Каждый контур реализует принцип регулирования по отклонению и имеет свой регулятор.
В электроприводе, показанном на рис. 4.1, два контура: внутренний подчиненный контур регулирование тока, содержащий регулятор тока РТ, преобразователь П, якорную цепь электродвигателя М и жесткую ООС по току, и внешний контур регулирования выходной координаты привода (угловой скорости ). Этот контур содержит регулятор скорости РС, внутренний контур регулирования тока, электродвигатель М и жесткую ООС по угловой скорости .
Задающим воздействием для внешнего контура является напряжение UВХ = KС, вырабатываемое задающим элементом ЗЭ, а для внутреннего контура – выходной сигнал регулятора скорости РС, пропорциональный заданному значению тока якоря.
В системах электропривода с подчиненным регулированием, как и в СУЭП с общим регулятором, возникает необходимость при скачкообразном воздействии на входе РС.
В системах электропривода с подчиненным регулированием достаточно просто решается задача ограничения величины тока в якорной цепи электродвигателя. Для этого достаточно ограничить уровень сигнала на выходе регулятора скорости, например, включением стабилитронов в цепи обратной связи ОУ, как показано на рисунке 4.3.
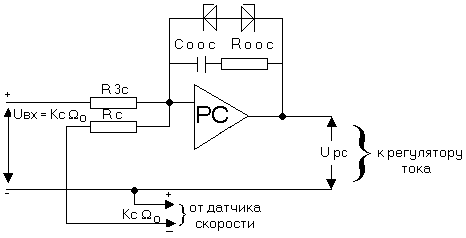
Рис. 4.3. Астатический регулятор скорости