

8.2. Примеры оптимальных и адаптивных суэп
8.2.1. Оптимальная суэп турбокомпрессора
Заданная
производительность
![]() турбокомпрессора может быть получена
при различных значениях скорости
и угла поворота
турбокомпрессора может быть получена
при различных значениях скорости
и угла поворота
![]() лопаток направляющего аппарата. Но
различные сочетания
и
неравноценны с точки зрения КПД установки.
На СУЭП возлагается задача поддержания
такого сочетания управляемых величин
и
,
при которых обеспечивается заданная
производительность
при максимальном КПД, т.е. при минимальной
потребляемой мощности.
лопаток направляющего аппарата. Но
различные сочетания
и
неравноценны с точки зрения КПД установки.
На СУЭП возлагается задача поддержания
такого сочетания управляемых величин
и
,
при которых обеспечивается заданная
производительность
при максимальном КПД, т.е. при минимальной
потребляемой мощности.
Функциональная схема одного из возможных вариантов такой системы приведена на рис. 8.2.
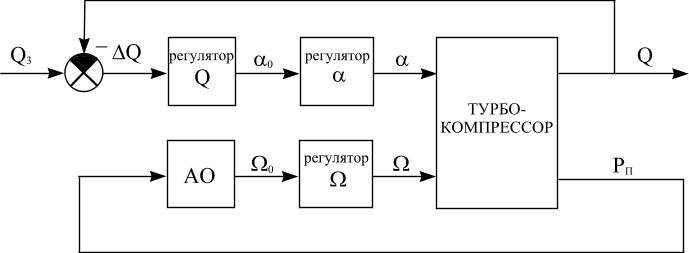
Рис. 8.2. Функциональная схема системы оптимизации
Статических режимов электропривода турбокомпрессора
Система относится
к оптимальным поисковым. В её состав
входят регуляторы
![]() и
,
причём выходной сигнал регулятора
и
,
причём выходной сигнал регулятора
![]() является задающим для регулятора
является задающим для регулятора
![]() .
.
Автоматический
оптимизатор АО ступенчато (пошагово)
изменяет задающее воздействие
![]() для регулятора скорости и после окончания
переходного процесса сопоставляет
значения потребляемой мощности Рп
при текущей
и предыдущей скоростях.
для регулятора скорости и после окончания
переходного процесса сопоставляет
значения потребляемой мощности Рп
при текущей
и предыдущей скоростях.
В результате
определяются величина и направление
очередного шага изменения
![]() для поддержания минимального значения
выбранного критерия оптимальности:
для поддержания минимального значения
выбранного критерия оптимальности:
![]() .
.
8.2.2. Адаптивный регулятор тока для вентильного электропривода постоянного тока
В системах подчиненного регулирования скорости быстродействие контура регулирования тока существенно зависит от режима работы вентильного преобразователя П, питающего якорную цепь ДПТ.
При работе П в режиме прерывистых токов (в области малых нагрузок) заметно возрастает эквивалентное сопротивление Rэ якорной цепи, а её индуктивность Lэ перестает влиять на переходной процесс, связанный с изменением среднего значения тока якоря I, т.к. в начале каждого интервала проводимости вентилей ток I равен 0.
В результате ПИ
регулятор тока с оптимальной настройкой
в режиме непрерывных токов не обеспечивает
качественного протекания переходных
процессов в режиме прерывистых токов.
Быстродействие контура регулирования
тока резко снижается. Для получения
высокого быстродействия в этом режиме
необходим интегральный (И) регулятор
тока с ОФП
![]() .
.
Решить возникающую проблему может адаптивный регулятор тока с одновременным изменением его структуры и параметров в зависимости от величины тока I.
Структурная схема одного из возможных вариантов такой реализации контура регулирования тока приведена на рис. 8.3.
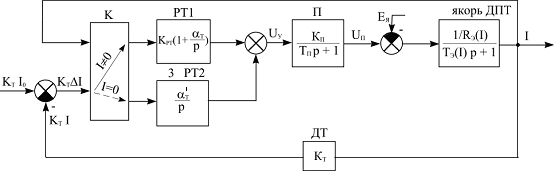
Рис. 8.3. Структурная схема контура регулирования тока
С адаптивным регулятором
При
![]() ,
когда якорная цепь двигателя представляет
собой апериодическое звено с коэффициентом
усиления 1/Rэ
и постоянной
времени
,
когда якорная цепь двигателя представляет
собой апериодическое звено с коэффициентом
усиления 1/Rэ
и постоянной
времени
![]() ,
управляемый током I
коммутатор К подключает сигнал ошибки
,
управляемый током I
коммутатор К подключает сигнал ошибки
![]() на вход ПИ регулятора тока РТ1. Параметры
регулятора (коэффициент усиления
на вход ПИ регулятора тока РТ1. Параметры
регулятора (коэффициент усиления
![]() и коэффициент интегральной составляющей
и коэффициент интегральной составляющей
![]() )
выбираются так, чтобы нейтрализовать
влияние постоянной времени Тэ
и обеспечить технически оптимальный
переходной процесс. Методика такого
выбора была рассмотрена ранее в теме
4.
)
выбираются так, чтобы нейтрализовать
влияние постоянной времени Тэ
и обеспечить технически оптимальный
переходной процесс. Методика такого
выбора была рассмотрена ранее в теме
4.
Когда ток якоря ДПТ уменьшается до нуля, влияние постоянной времени Тэ исчезает, а коэффициент усиления 1/Rэ уменьшается.
По нулевому значению
тока коммутатор К отключает РТ1 и
подключает И регулятор тока РТ2 с большой
величиной коэффициента
![]() .
Благодаря этому сохраняется высокое
быстродействие привода. Переключения
регуляторов РТ1 и РТ2 происходят с
частотой пульсаций выпрямленного
напряжения
.
Благодаря этому сохраняется высокое
быстродействие привода. Переключения
регуляторов РТ1 и РТ2 происходят с
частотой пульсаций выпрямленного
напряжения
![]() на выходе преобразователя П.
на выходе преобразователя П.