

5.6. Варианты суэп переменного тока с частотным регулированием
В зависимости от требований, предъявляемых к электроприводу, применяют разнообразные СУЭП, от простейших разомкнутых до очень сложных, реализация которых возможна только с применением специализированных вычислительных устройств на базе средств микропроцессорной техники.
Системы частотного управления асинхронных электроприводов делят на скалярные и векторные. При скалярном управлении совместно регулируют частоту и величину напряжения или тока статорных обмоток асинхронного двигателя. Соответственно различают частотное управление при питании двигателя от инвертора напряжения и частотно-токовое управление – при питании статорных обмоток АД от инвертора тока.
Достоинство систем скалярного управления – простота реализации как разомкнутых, так и замкнутых СУЭП. недостаток – трудность формирования желаемых законов изменения угловой скорости и момента в переходных режимах.
В системах векторного управления воздействуют непосредственно на вращающий момент двигателя путем изменения амплитудных значений токов и потокосцеплений, а также угловых сдвигов между ними. Питание электродвигателя при этом может осуществляться, как и в системах скалярного управления, от инвертора напряжения или инвертора тока.
Векторное управление требует измерения величины и пространственного положения вектора потокосцепления статора или ротора, непосредственно, с помощью соответствующих датчиков, или косвенно ‑ с использованием математической модели АД.
Системы с косвенным векторным управлением являются более простыми по технической реализации, но уступают системам с прямым векторным управлением по статическим и динамическим показателям.
Рассмотрим вначале несколько примеров систем скалярного частотного управления.
5.6.1. Система частотного регулирования с функциональным преобразователем и регуляторами тока и напряжения статора
Учитывая, что при
частотном регулировании механические
характеристики
![]() АД на рабочих участках жесткие (двигатель
обладает достаточным саморегулированием),
широко применяют СУЭП без обратной
связи по скорости. Один из распространенных
вариантов таких систем приведен на рис.
5.10.
АД на рабочих участках жесткие (двигатель
обладает достаточным саморегулированием),
широко применяют СУЭП без обратной
связи по скорости. Один из распространенных
вариантов таких систем приведен на рис.
5.10.
Электродвигатель М получает питание от трехфазной сети переменного тока через управляемый выпрямитель УВ, L–C сглаживающий фильтр и автономный инвертор напряжения АИН, которые в совокупности образуют преобразователь частоты ПЧ с явно выраженным звеном постоянного тока.
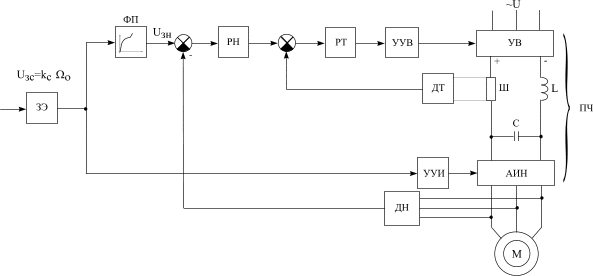 Рис.
5.10. Функциональная схема системы
частотного регулирования АД
Рис.
5.10. Функциональная схема системы
частотного регулирования АД
С функциональным преобразователем
Как отмечалось в теме 2, для поддержания нормального намагничивания двигателя и перегрузочной способности во всем диапазоне скоростей необходимо одновременно с изменением выходной частоты АИН по определенному закону изменять выходное напряжение УВ.
Для достижения
этого напряжение с задающего элемента
ЗЭ поступает непосредственно на вход
устройства управления инвертором УУИ,
а на вход регулятора напряжения РН через
нелинейный функциональный преобразователь
ФП с требуемой зависимостью задающего
напряжения
![]() от скорости
от скорости
![]() .
.
Стабилизация напряжения на двигателе осуществляется двухконтурной системой подчиненного регулирования с внутренним контуром регулирования выпрямленного тока (регулятор тока РТ) и внешним контуром регулирования напряжения. Сигналы обратной связи по току и напряжению формируются соответствующими датчиками тока ДТ и напряжения ДН. Выходной сигнал РТ поступает на устройство управления выпрямителем УУВ, выполненное по принципу импульсно-фазового регулирования (смотри тему 2).
Регуляторы тока и напряжения выполняются на операционных усилителях, как и в СУЭП постоянного тока.
В рассматриваемой системе наибольшей электромагнитной инерционностью обладает сглаживающий фильтр, что позволяет пренебречь электромагнитными переходными процессами в АД. С учетом этого, выбор оптимальных параметров регуляторов тока и напряжения осуществляется так же, как и в двухконтурных СУЭП постоянного тока. Для повышения точности регулирования в статике обычно оба регулятора выполняют пропорционально-интегральными.