

9.3. Применение программируемых регулирующих контроллеров в электроприводах
Автоматическое управление электроприводами и технологическими процессами осуществляется преимущественно с помощью аналоговых и цифровых регуляторов, реализующих П, ПИ, ПИД законы регулирования. Каждый из регуляторов представляет собой узко-специализированное устройство.
Программируемый регулирующий контроллер (ПРК) может заменить до 10...50 обычных регуляторов с записью законов управления в памяти контроллера. Обладая значительными логическими и вычислительными возможностями, ПРК позволяет реализовать сложные и эффективные алгоритмы управления.
В отличие от универсальных ЭВМ в ПРК основные программы постоянно размещены в энергозависимой памяти, которая программируется изготовителем контроллера. Для ПРК не требуются системные средства отладки прикладного программного обеспечения, как и стандартные средства ввода-вывода, применяемые для общения пользователя с ЭВМ.
На практике применяют одно- и многоконтурные ПРК. Упрощенная структурная схема многоконтурного ПРК приведена на рис. 9.2.
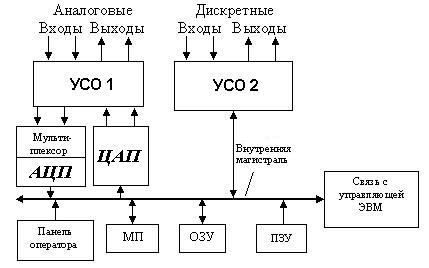
Рис. 9.2. Структурная схема многоконтурного ПРК
Устройства сопряжения УСО 1, УСО 2 обеспечивают согласование уровней сигналов с гальванической развязкой.
Библиотека программ контроллера компонуется стандартными алгоритмами (реализация разнообразных законов регулирования, математических операций сложения, умножения, интегрирования, дифференцирования, нелинейных преобразований, логической обработки дискретных сигналов, формирования временных задержек). Комбинируя перечисленные алгоритмы, можно строить системы автоматического управления практически любой сложности, в том числе многоканальные, многосвязные, многоуровневые.
Панель оператора служит для настройки каналов с выбором закона регулирования и параметров регулятора; для изменения задающих воздействий; для получения информации о состоянии управляемых объектов при помощи светодиодов и цифровых индикаторов.
ПРК может работать как автономно, так и во взаимодействии с управляющей ЭВМ более высокого уровня.
Применение многоконтурных ПРК оправдано в сложных системах управления, содержащих более 6–8 каналов (управляемых величин), например, в системах управления приводами промышленных роботов с большим количеством степеней свободы.
В более простых системах управления целесообразно применение одноконтурных ПРК. Вариант функциональной схемы САУ с таким регулятором показан на рис. 9.3.
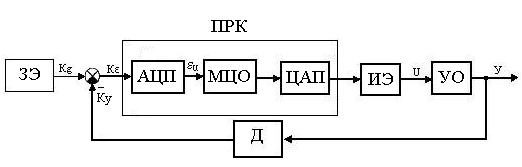
Рис. 9.3 – Функциональная схема САУ с одноконтурным ПРК
ПРК содержит АЦП, ЦАП и модуль цифровой обработки (МЦО) на базе микропроцессора. Аналоговый сигнал ошибки К с помощью АЦП преобразуется в цифровой код ц, поступающий на МЦО. МП на основании информации об ошибке, в соответствии с принятым законом регулирования, вырабатывает цифровое управляющее воздействие Uц, которое посредством ЦАП и исполнительного элементы ИЭ преобразуется в аналоговое управляющее воздействие U на управляемый объект УО. Возможен вариант САУ с цифровыми задающим элементом и датчиком. В этом случае необходимость в АЦП отпадает.
Одноконтурные ПРК эффективно реализуются с использованием современных однокристальных сигнальных микропроцессоров, в которых АЦП, МЦО и ЦАП выполнены в виде одной интегральной БИС.
В состав такой микросхемы часто входит мультиплексор, позволяющий осуществлять последовательную цифровую обработку нескольких (обычно до 8) аналоговых сигналов.
В состав сигнального процессора может входить также несколько ЦАП, что превращает его в многоконтурный ПРК.