

4.4. Суэп с двухзонным регулированием скорости
В такой системе обмотка возбуждения электродвигателя получает питание от управляемого выпрямителя на тиристорах. При скорости, меньше номинальной, на обмотку поступает полное напряжение питания, а регулирование осуществляется изменением напряжения якорной цепи.
При скорости, выше номинальной, регулирование производится ослаблением поля за счёт снижения напряжения на обмотке возбуждения.
Для регулирования
по цепи возбуждения могут использоваться
сигналы по скорости ,
ЭДС вращения якоря
![]() или напряжению UП
якорной
цепи.
или напряжению UП
якорной
цепи.
Рассмотрим одну из таких взаимосвязанных систем, когда регулирование по цепи якоря осуществляется двухконтурной СУЭП с подчиненным управлением, а по цепи возбуждения в функции напряжения UП питания якорной цепи электродвигателя.
Функциональная схема подсистемы регулирования возбуждения в этом случае имеет вид, показанный на рис. 4.10.

Рис. 4.10. Функциональная схема подсистемы
Регулирования возбуждения
При напряжении питания якоря меньшем опорного напряжения U0, близкого к номинальному (U0 0,95 UН), напряжение на входе регулятора возбуждения РВ равно нулю. На обмотку возбуждения ОВ от преобразователя возбуждения ПВ поступает полное напряжение, и двигатель работает с номинальным возбуждением.
Когда по мере
разгона электродвигателя напряжение
UП
начинает превышать опорное Uо,
разность напряжений
![]() поступает на регулятор возбуждения.
поступает на регулятор возбуждения.
Увеличивается угол сдвига моментов отпирания тиристоров по отношению к моментам перехода сетевого напряжения через нуль. В результате происходит уменьшение напряжения на зажимах обмотки возбуждения ОВ, ослабление магнитного потока Ф, создаваемого обмоткой, и увеличение скорости двигателя .
Зависимость напряжения Uв от управляющего сигнала U показана на рис. 4.11.
Запишем по второму закону Кирхгофа уравнение, связывающее ток возбуждения IВ и напряжение UВ:
![]() ,
или
,
или
![]() ,
,
где
![]() – электромагнитная постоянная времени
обмотки возбуждения.
– электромагнитная постоянная времени
обмотки возбуждения.
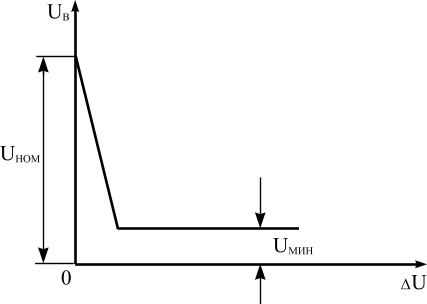
Рис. 4.11. зависимость напряжения возбуждения
От управляющего сигнала в статике
С учетом этого
можно изобразить структурную схему
подсистемы регулирования возбуждения
(рис. 4.12) где.
![]() ,
,
![]() ‑ ОФП регулятора возбуждения и
преобразователя.
‑ ОФП регулятора возбуждения и
преобразователя.

Рис. 4.12. структурная схема подсистемы регулирования возбуждения
Регулятор РВ может быть статическим (П) или астатическим (ПИ). Возможно также подчиненное регулирование при введении внутреннего контура с регулятором тока возбуждения Iв.
Зависимость магнитного потока Ф от тока возбуждения IВ нелинейная и определяется видом кривой намагничивания электродвигателя. По этой же причине индуктивность LВ обмотки возбуждения и величина постоянной времени TВ зависят от величины тока IВ, т.е. рассматриваемая система является нелинейной.
С учетом изложенного получим структурную схему подсистемы регулирования электродвигателя по цепи якоря.
Запишем систему уравнений, описывающих поведение этой подсистемы.
Для выходного напряжения UП преобразователя П:
![]() ,
,
где
![]() ,
,
![]() ,
,
![]() – ОФП регуляторов скорости и тока, а
также преобразователя.
– ОФП регуляторов скорости и тока, а
также преобразователя.
Для управляемого объекта (электродвигателя):
![]() ,
,
![]() ,
,
где
![]() ‑ конструктивная постоянная
электродвигателя;
‑ конструктивная постоянная
электродвигателя;
![]() ‑ момент
сопротивления на валу электродвигателя;
‑ момент
сопротивления на валу электродвигателя;
![]() ‑ приведенный
к валу двигателя момент инерции
поступательно и вращательно движущихся
масс электропривода.
‑ приведенный
к валу двигателя момент инерции
поступательно и вращательно движущихся
масс электропривода.
На основании этих уравнений структурная схема подсистемы регулирования электродвигателя по цепи якоря приведена на рис. 4.13, где знаками Х обозначены блоки перемножения двух переменных (, I и , ).
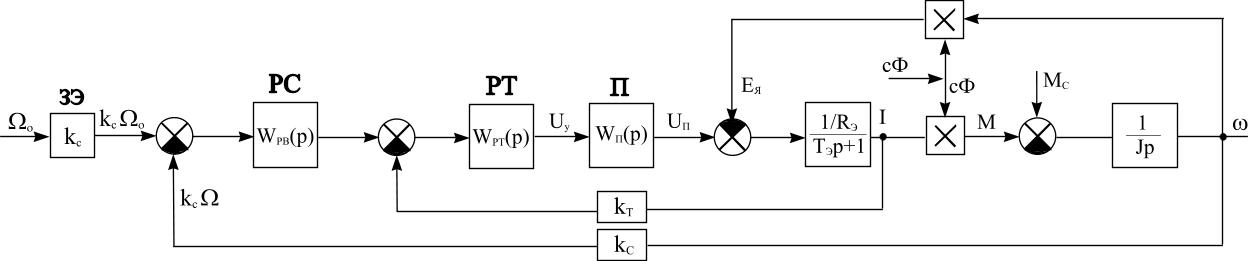
Рис. 4.13. Структурная схема подсистемы регулирования
двигателя по цепи якоря
Объединяя структурные схемы двух подсистем, получаем общую структурную схему СУЭП с двухзонным регулированием скорости.
Система существенно нелинейная из-за наличия блоков произведения переменных и нелинейной зависимости магнитного потока от тока возбуждения. Поэтому эффективное её исследование (анализ и синтез) возможно только с применением ЭВМ.
4.5. Схемная реализация основных вариантов СУЭП
постоянного тока
Как уже отмечалось, на практике наибольшее применение получили четыре варианта СУЭП постоянного тока.
4.5.1. Однократноинтегрирующая СУЭП с ПИ регулятором
тока и П регулятором угловой скорости
Принципиальная электрическая схема ее при выполнении регуляторов на операционных усилителях приведена на рис. 4.14.
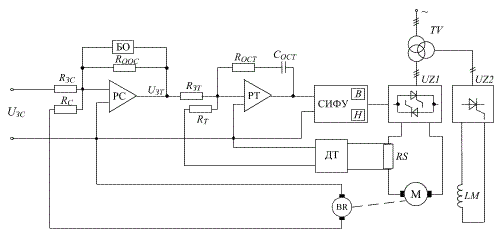
Рис. 4.14. Принципиальная электрическая схема
однократноинтегрирующей СУЭП с ПИ регулятором
тока и П регулятором угловой скорости
На схеме использованы следующие условные обозначения элементов:
РС, РТ – регуляторы угловой скорости и тока;
БО – блок ограничения выходного напряжения РС, а, следовательно, и тока якорной цепи электродвигателя. Вариант его реализации на стабилитронах был приведен ранее на рисунке 4.3;
СИФУ – система импульсно-фазового управления тиристорным преобразователем UZ1 (управляемым выпрямителем в силовой цепи электродвигателя);
R – измерительный шунт (воспринимающий элемент датчика тока ДТ);
L – сглаживающий дроссель;
BR – датчик угловой скорости (тахогенератор постоянного тока);
UZ2 – выпрямитель цепи питания обмотки возбуждения LM электродвигателя М;
TV – питающий трансформатор.
Аналогичные обозначения используются и на последующих схемах.