

С ограничением выходного сигнала.
Электромеханическая характеристика в статике в этом случае подобна таковой для электропривода с общим регулятором скорости и отсечкой по току.
Для улучшения переходного процесса при пуске электропривода между задающим элементом и регулятором скорости часто вводят задатчик интенсивности (ЗИ), обеспечивающий линейное во времени нарастание сигнала на входе РС.
Один из возможных вариантов его выполнения показан на рис. 4.4.
Принцип его действия основан на заряде конденсатора С постоянным током, который формируется усилителем на транзисторе, включённым по схеме с общей базой.
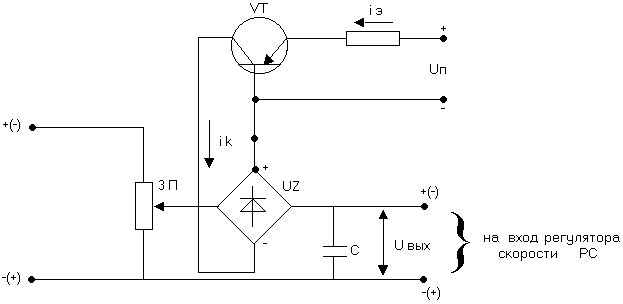
Рис. 4.4. Принципиальная схема задатчика интенсивности.
Цепь эмиттер ‑ база транзистора получает питание от стабилизированного источника, создающего постоянный ток эмиттера, а следовательно, и ток коллектора, которым заряжается конденсатор С. Выпрямительный мостик обеспечивает однонаправленное протекание тока коллектора при любой полярности напряжения питания задающего потенциометра ЗП.
При подаче напряжения на ЗП напряжение UВЫХ на конденсаторе нарастает линейно до напряжения UВХ с полярностью, определяемой полярностью входного напряжения.
В системе подчиненного регулирования имеются возможности:
раздельного регулирования переменных (в данном случае тока и скорости);
раздельной настройки контуров (начиная с внутреннего);
коррекции переходных процессов в каждом из контуров.
В результате значительно упрощаются: анализ переходных процессов, техническая реализация коррекции, настройка системы при ее эксплуатации.
4.2. Математическая модель двухконтурной суэп с подчиненным регулированием
Запишем в операторной форме уравнения, описывающее поведение в динамике СУЭП, изображенной на рис. 4.1. Для большей общности, примем, что оба регулятора – угловой скорости и тока являются пропорционально-интегральными (ПИ) с операторными функциями передачи
![]() и
и ![]() .
.
Линеаризованную модель преобразователя П представим апериодическим звеном с коэффициентом усиления КП и постоянной времени TП.
Тогда уравнение для выходного напряжения преобразователя (4.1) будет следующим:
![]() .
.
Разделим обе части
его на UБ
= CE0
и введем
относительные значения для напряжения ![]() и
тока
и
тока ![]() ,
,
где IН ‑ номинальное значение тока якорной цепи электродвигателя.
Тогда после несложных преобразований уравнение (4.1) перепишется в следующем виде:
![]() (4.2)
(4.2)
где ![]() – общий коэффициент усиления разомкнутой
системы по контуру регулирования угловой
скорости;
– общий коэффициент усиления разомкнутой
системы по контуру регулирования угловой
скорости;
![]() – коэффициент усиления по контуру тока;
– коэффициент усиления по контуру тока;
![]() – коэффициент статизма по возмущающему
воздействию для разомкнутой системы
электропривода.
– коэффициент статизма по возмущающему
воздействию для разомкнутой системы
электропривода.
Уравнения в относительных единицах, описывающие электродвигатель, останутся теми же, что и для СУЭП с общим регулятором (3.16), (3.17):
; (4.3)
![]() , (4.4)
, (4.4)
Уравнениям (4.2...4.4) соответствует структурная схема, приведенная на рис. 4.5.
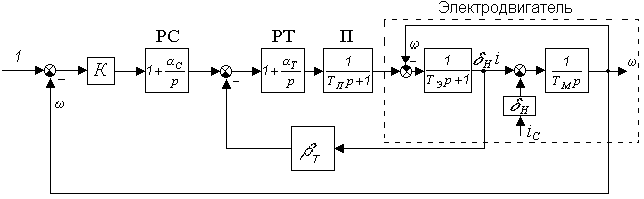
Рис. 4.5. Обобщенная структурная схема СУЭП
С подчиненным регулированием
Преобразование данной схемы по правилам, изучаемым в курсе “Теория автоматического управления”, позволяет получить в операторной форме следующую зависимость (4.5) выходной управляемой величины от задающего 0=1 и возмущающего ic воздействий:

Рассматриваемая
СУЭП с ПИ-регуляторами угловой скорости
и тока называется двукратноинтегрирующей.
Она является астатической как по
задающему, так и по возмущающему
воздействиям. Управление осуществляется
без статической ошибки, т. е. обе
составляющие коэффициента статизма S
равны нулю. Действительно, полагая
p=0,
получаем, что после окончания переходного
процесса (в статике)
![]() Настраиваемыми параметрами для данной
СУЭП являются:
Настраиваемыми параметрами для данной
СУЭП являются:
![]()
Из приведенной на рисунке 4.3 структурной схемы можно получить ряд других вариантов систем управления, широко применяемых на практике.
Так, при Т
=0
получаем СУЭП с ПИ регулятором скорости
и П регулятором тока или без него (с
жесткой ООС по току на вход преобразователя).
В последнем варианте СУЭП не относится
к классу систем с подчиненным
регулированием. Это система управления
с ООС по угловой скорости с параллельной
токовой коррекцией, получившая широкое
применение при диапазоне регулирования
100...200. Настраиваемыми параметрами для
нее являются:
![]() а выражение (4.5) имеет следующий вид:
а выражение (4.5) имеет следующий вид:
 .
.
Полагая p=0,
получаем, что в статике
![]() т. е. регулирование угловой скорости в
данной СУЭП осуществляется, как и в
двукратноинтегрирующей системе
управления без статической ошибки.
т. е. регулирование угловой скорости в
данной СУЭП осуществляется, как и в
двукратноинтегрирующей системе
управления без статической ошибки.
При с = 0 получаем однократноинтегрирующую СУЭП с ПИ регулятором тока и П регулятором угловой скорости, для которой выражение (4.5) принимает вид:
 .
.
Настраиваемыми
параметрами для данной системы являются:
![]()
Полагая p=0,
получаем:
![]() т. е. в системе имеет место статическая
ошибка, зависящая от величины возмущающего
воздействия. Коэффициент статизма при
этом равен:
т. е. в системе имеет место статическая
ошибка, зависящая от величины возмущающего
воздействия. Коэффициент статизма при
этом равен:
![]()
При с = 0, Т =0 получаем СУЭП с П регулятором скорости и жесткой отрицательной обратной связью на вход преобразователя, для которой

с настраиваемыми
параметрами
![]()
Полагая в последнем выражении p=0, находим установившееся значение угловой скорости:
![]()
Полагая iС =1, находим величину коэффициента статизма:
![]()
Наконец, полагая Т =0, получаем выражение для системы управления только с отрицательной обратной связью по угловой скорости:

с единственным настраиваемым параметром К и величиной коэффициента статизма
![]()
В случаях, когда не предъявляются жесткие требования к точности поддержания заданной угловой скорости при диапазоне регулирования 10 ‑ 50 применяют СУЭП подчиненного регулирования с обратной связью по напряжению (ЭДС). Вместо тахогенератора сигнал, пропорциональный угловой скорости, определяется косвенно по напряжению и току электродвигателя. Действительно, из соотношения (4.3) получаем:
![]() . (4.6)
. (4.6)
Но для получения требуемого сигнала согласно (4.6) необходимо дифференцирующее звено с ОФП ТЭ p, что на практике реализовать затруднительно из-за сильной чувствительности такого звена к различным помехам и наводкам. Поэтому обычно используют сигнал обратной связи uОС, полученный умножением на ОФП апериодического звена
![]() :
:
![]() .
.
Соответственно и задающее воздействие подают на вход системы через фильтр с такой же ОФП. В результате получаем структурную схему, показанную на рис. 4.6.
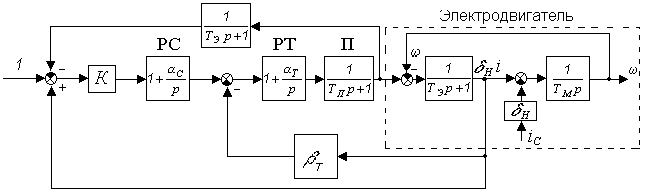
Рис. 4.6. Структурная схема СУЭП с обратной связью по напряжению