

Вентильного каскада: 1 – естественная характеристика;
2, 3 – искусственные при различных значениях угла инвертирования
При снижении скорости характеристики смягчаются, поэтому диапазон регулирования Д ограничен заданной точностью поддержания скорости при изменении момента сопротивления и снижением перегрузочной способности привода.
Диапазон регулирования расширяется при вентиляторном моменте нагрузки, когда при снижении угловой скорости в квадратичной зависимости уменьшается момент сопротивления на валу двигателя.
Для расширения диапазона регулирования и повышения точности управления применяют замкнутые системы управления асинхронными каскадами с различными вариантами обратных связей.
5.8.2. Система управления авк с отрицательной обратной
Связью по скорости и положительной обратной связью
По выпрямленному току ротора
Функциональная схема такой суэп, аналогичная системам регулирования скорости дпт с независимым возбуждением, приведена на рис. 5.19.
Система двухконтурная с общим регулятором Р, который выполняют на операционном усилителе.
На вход регулятора поступает алгебраическая сумма:
- задающего напряжения Uзс= Кс·о, пропорционального заданной скорости Ωо;
- сигнала отрицательной обратной связи (ООС) по скорости Кс·, пропорционального фактической скорости (от тахогенератора BR);
- сигнала положительной обратной связи (ПОС) по току Кт·Id, пропорционального выпрямленному току ротора Id (от датчика тока ДТ).

Рис. 5.19. Функциональная схема системы управления АВК с
Оос по угловой скорости и пос по выпрямленному току ротора
Выходной сигнал регулятора поступает на устройство импульсно-фазового управления УУ инвертором И.
Совместные действия ООС по скорости и ПОС по току обеспечивает необходимую жесткость механических характеристик привода, а следовательно, высокую точность поддержания заданной скорости при изменении нагрузки.
При упрощенном анализе и синтезе системы пренебрегают электромагнитными переходными процессами в магнитосвязанных обмотках статора и ротора АД, учитывая что:
1. Наибольшей магнитной инерционностью обладает цепь ротора со сглаживающим дросселем L.
2. При постоянном напряжении питания статорной цепи величина основного магнитного потока остается практически постоянной, и электромагнитный момент АД определяется практически током ротора.
Цепь выпрямленного
тока ротора приближенно представляют
эквивалентным апериодическим звеном
с ОФП Wэ(р)
=
![]() ,
,
где
![]() – электромагнитная постоянная времени,
равная отношению индуктивности Lэ
к активному сопротивлению Rэ
цепи.
– электромагнитная постоянная времени,
равная отношению индуктивности Lэ
к активному сопротивлению Rэ
цепи.
При таком подходе величины выпрямленного тока ротора Id и электромагнитного момента АД определяются по формулам:
![]()
![]()
где ксх – коэффициент схемы выпрямления (для трехфазной мостовой схемы ксх =1,35);
Еr – действующее значение ЭДС на кольцах неподвижного ротора;
Е доб – вводимая в цепь ротора противо-ЭДС;
xr – индуктивное сопротивление рассеяния АД, приведенное к обмотке ротора;
с, s– синхронная скорость вращения и скольжения.
В АВК как объекте управления проявляются две нелинейности:
1. Зависимость сопротивления Rэ от скольжения s. При изменении скольжения от 1 до номинального величина Rэ изменяется в 2…5 раз.
2. Нелинейная зависимость момента М от тока Id.
При синтезе замкнутой СУЭП используют приближенную линеаризованную модель АВК. Зависимость момента от тока Id принимают линейной
![]() ,
,
где величину коэффициента пропорциональности с определяют по средней нагрузке.
Сопротивление Rэ принимают постоянным, соответствующим среднему скольжению при заданном диапазоне регулирования скорости. При учете этих допущений с использованием функциональной схемы, а также уравнения равновесия моментов на валу двигателя
![]()
составляется линеаризованная структурная схема рассматриваемой СУЭП (рис. 5.20).
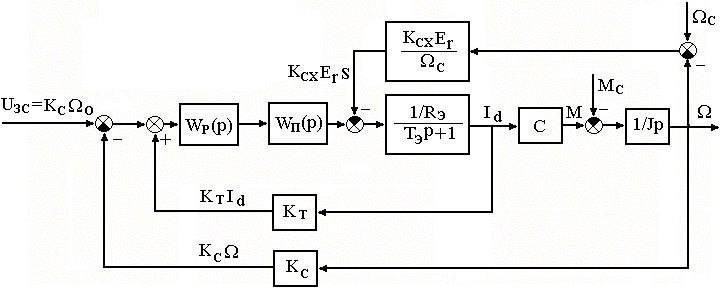
Рис. 5.20. Структурная схема системы управления АВК с отрицательной ОС по скорости и положительной ОС по выпрямленному току ротора