Решение
1. Определим проекции главного вектора произвольной пространственной системы сил на декартовые оси координат:
1)
![]() ,
,
2)
![]() ,
,
3)
![]() ,
,
где
 ,
и
,
и
 ,
,
Тогда модуль главного вектора пространственной системы сил равен:
![]() Н.
Н.
Изобразим главный вектор
![]() в декартовой системе координат по трём
его проекциям, поместив начало вектора
в точку О (в начало координат).
в декартовой системе координат по трём
его проекциям, поместив начало вектора
в точку О (в начало координат).
2. Определим проекции главного момента произвольной пространственной системы сил на декартовые оси координат:
4)
![]() Н∙см,
Н∙см,
5)![]() ,
,
6)
![]() Н∙см,
Н∙см,
Определим модуль главного момента системы сил:
![]() Н∙см.
Н∙см.
Изобразим главный момент
![]() в декартовой системе координат по трём
его проекциям, поместив начало вектора
в точку О (в начало координат).
в декартовой системе координат по трём
его проекциям, поместив начало вектора
в точку О (в начало координат).
3. Определим минимальный главный момент системы сил, для чего преобразуем второй инвариант пространственной системы сил:
![]() ,
,
тогда минимальный главный момент равен:
 Н∙см.
Н∙см.
4. Так как
![]() и
и
![]() ,
то пространственная система сил сводится
к «динаме» или динамическому
винту. Найдём уравнение центральной
оси динамического (силового) винта,
используя тройное уравнение
,
то пространственная система сил сводится
к «динаме» или динамическому
винту. Найдём уравнение центральной
оси динамического (силового) винта,
используя тройное уравнение
 ,
,
из этих 3-х уравнений независимыми являются любые два:
 ,
или
,
или
 и
и
![]()
 ,
или
,
или
 и
и
![]() см,
см,
 ,
или
,
или
![]() и
и
см.
З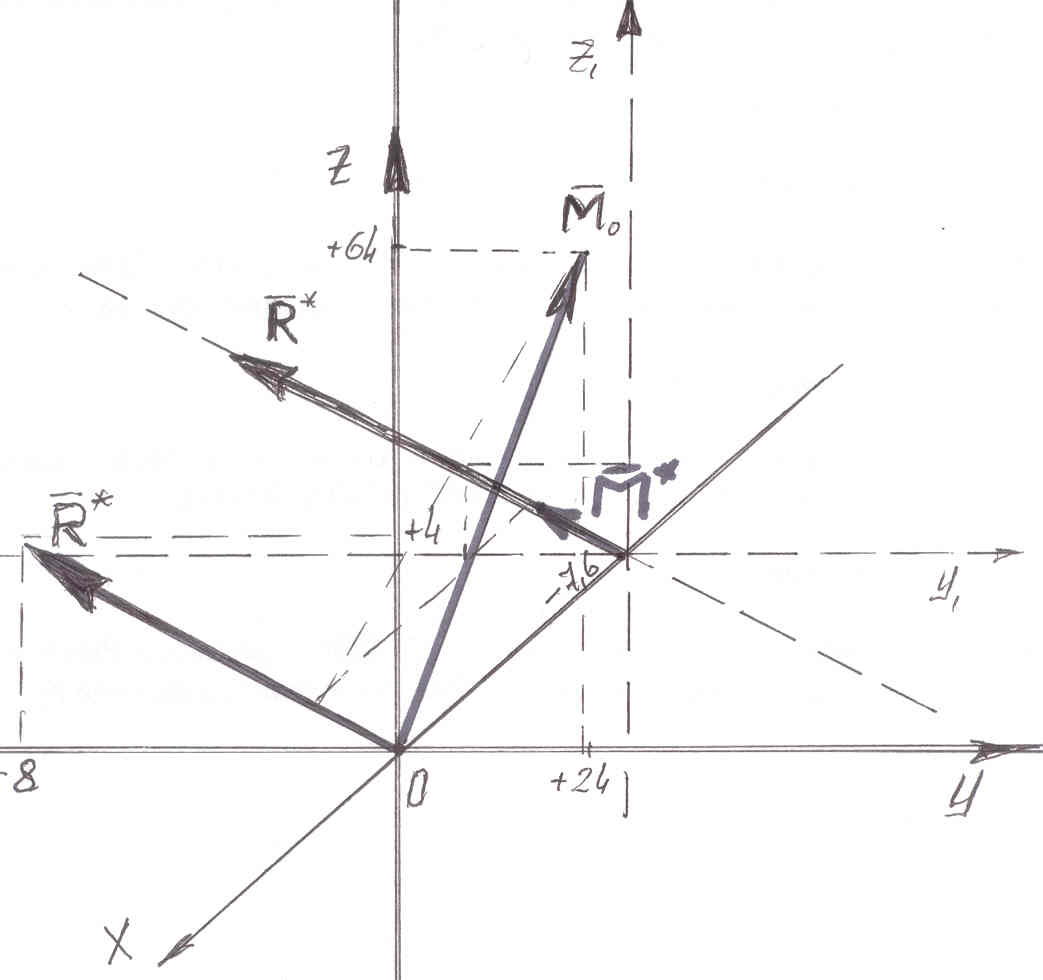 начения
координат точек пересечения центральной
осью плоскостей декартовых координат,
определённые с помощью этих уравнений
покажем в табличной форме.
начения
координат точек пересечения центральной
осью плоскостей декартовых координат,
определённые с помощью этих уравнений
покажем в табличной форме.
Точки |
Координаты, см |
||
х |
y |
z |
|
А1 |
- |
- |
- |
А2 |
-7,6 |
-2 |
1 |
А3 |
-7.6 |
1 |
-0,5 |
По указанным в таблице координатам
точек А1, А2, А3 строим центральную ось
динамического винта, то есть линию на
которой расположены главный вектор
пространственной системы сил и
минимальный главный момент
![]() .
Центральная ось лежит в плоскости
параллельной плоскости YOZ на
расстоянии от неё
см.
.
Центральная ось лежит в плоскости
параллельной плоскости YOZ на
расстоянии от неё
см.
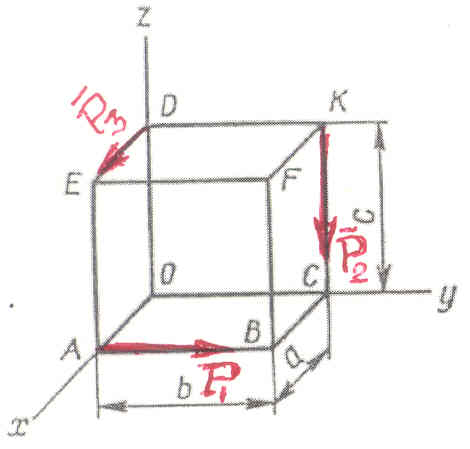
Пример выполнения задания (КР С-6) №18
Определить: главный вектор и главный момент заданной пространственной системы сил относительно центра О и установить, к какому простейшему виду приводится эта система, для чего определить наименьший главный момент и:
а) если система сил приводится к паре сил, то показать момент этой пары, приложив его в точке О;
б) если заданная система сил приводится к равнодействующей силе , то найти уравнение линии действия этой равнодействующей и определить точки пересечения этой линией координатных плоскостей и изобразить равнодействующую на чертеже;
в) если заданная система сил приводится к динаме (силовому винту), то найти уравнения центральной оси и определить точки пересечения этой осью координатных плоскостей (хоу, хоz, yoz) и изобразить и на чертеже.
Размеры параллепипеда, по граням которого расположены силы, модули сил и их направления указаны на рисунке и в нижселедующей таблице.
Размеры паралепипеда сил, см |
Силы системы |
|||||||||
|
|
|
|
|||||||
а |
b |
c |
Модуль, Н |
Направление |
Модуль, Н |
Направление |
Модуль, Н |
Направление |
Модуль, Н |
Направление |
10 |
15 |
20 |
40 |
AB |
20 |
KC |
16 |
DE |
- |
- |