

3.2 Контрольная работа с-6.
Приведение пространственной системы сил к простейшему виду.
Определение главного вектора и главного момента системы сил.
(Приложение №6 к «Методическому пособию – II семестр»)
Пример выполнения задания (КР С-6) №1.

Методика выполнения задания:
Дана система сил
![]() ;
модули, точки приложения и направления
этих сил указаны в таблице
;
модули, точки приложения и направления
этих сил указаны в таблице
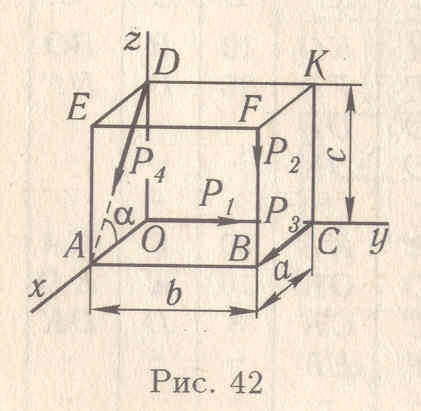
Размеры параллепипеда, см |
Силы системы |
|||||||||||||
Р1 |
Р2 |
Р3 |
Р4 |
|||||||||||
а |
b |
c
|
Модуль,Н
|
Точка приложения |
Направление |
Модуль,Н
|
Точка приложения |
Направление |
Модуль,Н
|
Точка приложения |
Направление |
Модуль,Н
|
Точка приложения |
Направление |
30 |
50 |
40 |
10 |
0 |
OC |
4 |
F |
FB |
4 |
C |
CB |
11 |
D |
DA |
Решение:
1. Определение главного вектора пространственной системы сил.
Заданная пространственная система сил показана на рис. 42.
Предварительно определяем сосинус и
синус угла наклона вектора силы
![]() :
:
![]() ,
,
![]() ,
,
Определим проекции главного вектора на оси координат:
![]()
![]()
![]()
Модуль главного вектора:
![]()
Определяем направляющие косинусы главного вектора пространственной системы сил:
![]() ,
,
![]() ,
,
![]() .
.
Г лавный
вектор
лавный
вектор
![]() показан на рис. 43.
показан на рис. 43.
2. Определение главного момента заданной системы сил относительно центра декартовой системы координат, точки О.
Главные моменты пространственной
системы сил относительно координатных
осей:
![]() ,
,
![]() ,
,
![]() .
.
Модуль главного момента:
![]()
Определим направляющие косинусы вектора главного момента по отношению к осям декартовых координат:
![]()
![]() ,
,
![]()
Главный момент
![]() показан на рис. 43.
показан на рис. 43.
3. Вычисление наименьшего главного момента заданной системы сил.
Подставляя определённые ранее значения проекций главного вектора и главного момента определим наименьший главный момент:
![]()
4. Так, как полученые нами
![]() ,
,
![]() ,
то данная система сил приводится в общем
случае к ДИНАМЕ (силовому винту).
,
то данная система сил приводится в общем
случае к ДИНАМЕ (силовому винту).
Воспользуемся уравнением центральной оси:
 (А)
(А)
Из этих трех уравнений (А) независимыми являются только два. Подставляя в них найденные числовые значения величин, находим:
 ,
,
![]()
 ,
,
![]()
Значения координат точек пересечения центральной осью координатных плоскостей помещены в нижеследующей таблице:
Точки |
Координаты, см |
||
x |
y |
z |
|
А1(ZOY) |
0 |
5,1 |
25,5 |
А2(XOZ) |
-5,4 |
0 |
32,0 |
А3(XOY) |
21,1 |
25,0 |
0 |
Построенная по точкам А1 А2 А3 пересечения с плоскостями ZOY, XOZ, XOY центральная ось системы сил показана на рис. 43.
Примечание: Если силы приводятся
к равнодействующей, т.е.
![]() ,
а
,
а
![]() ,
то числители уравнений А равны нулю и
уравнения линии действия равнодействующей
принимают вид:
,
то числители уравнений А равны нулю и
уравнения линии действия равнодействующей
принимают вид:
![]() ,
,
![]() ,
,
![]() (В)
(В)
где
![]() - проекции равнодействующей
- проекции равнодействующей
![]() силы на координатные оси;
силы на координатные оси;
![]() - главные моменты системы сил относительно
координатных осей. Тогда модуль главного
момента
- главные моменты системы сил относительно
координатных осей. Тогда модуль главного
момента
![]()
Из трех уравнений (В) независимыми являются только 2.
Пример выполнения задания (КР С-6) №12
Определить:
главный вектор
![]() и главный момент
и главный момент
![]() заданной пространственной системы сил
относительно центра О и установить, к
какому простейшему виду приводится эта
система, для чего определить наименьший
главный момент
заданной пространственной системы сил
относительно центра О и установить, к
какому простейшему виду приводится эта
система, для чего определить наименьший
главный момент
![]() и:
и:
а) если система сил приводится к паре сил, то показать момент этой пары, приложив его в точке О;
б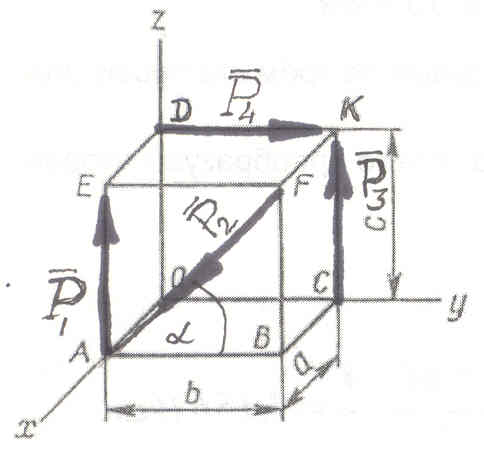 )
если заданная система сил приводится
к равнодействующей силе
,
то найти уравнение линии действия этой
равнодействующей и определить точки
пересечения этой линией координатных
плоскостей и изобразить равнодействующую
на чертеже;
)
если заданная система сил приводится
к равнодействующей силе
,
то найти уравнение линии действия этой
равнодействующей и определить точки
пересечения этой линией координатных
плоскостей и изобразить равнодействующую
на чертеже;
в) если заданная система сил приводится к динаме (силовому винту), то найти уравнения центральной оси и определить точки пересечения этой осью координатных плоскостей (хоу, хоz, yoz) и изобразить и на чертеже.
Размеры параллепипеда, по граням которого расположены силы, модули сил и их направления указаны на рисунке и в таблице.
Размеры паралепипеда сил, см |
Силы системы |
|||||||||
|
|
|
|
|||||||
а |
b |
c |
Модуль, Н |
Направление |
Модуль, Н |
Направление |
Модуль, Н |
Направление |
Модуль, Н |
Направление |
4 |
8 |
6 |
6 |
AE |
20 |
FA |
10 |
CK |
8 |
DK |