

4. Класифікація систем автоматичного керування:
САК поділяється по різних ознаках на категорії:
1)По принципу керування
-розімкнута
-керування по збуренню ( компенсації)
-керування по відхиленню ( зворотн. зв'язок)
-комбіноване керування.
2)По призначенню:
-стабілізації
-програмне
-слідкуюче
3)По виду електро споживання ( живлення) кер. пристар.
-прямого керування
-непрямого керування
4)По формі регулюв. сигналу в часі
-неперервні
-дискретні ( імпульсні, цифрові, релейні)
5)По кількості зворотн. зв’язків
-одно контурні ( 1 зв'язок)
-багато контурні ( є додаткові місцеві зворотні зв’язки)
6)По к-сті регульованих параметрів
-одномірні
-багатомірні
7)По функціон. зв’язках вх. і вих.. величин
-лінійні ( лінеаризовані)
-нелінійні ( суттєво нелінійні)
8)По закону регулювання
-статичні ( пропорційні)
-астатичні ( інтегральні)
-ізодромні ( пропорц. – інтегр.)
-пропорційно - диференціюючі
-пропорц. – інтегр. – диференц.
.
3. Фундаментальні принципи керування.
Їх є 3:
1.Принцип розімкнутого керування;
2.Принцип компенсації ( керув. по збуренню)
3.Принцип зворотнього зв»язку ( керування по відхиленню)
1) В розімкнутих САК вихідна величина об»акта не вимір. Тобто немає контролю за станом об»акта, і в них відсутній зв'язок між входом і виходом системи.
![]()
Система стабілізації синхр. генератора
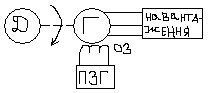
ПЗГ – програма задання напруги генератора
2) Керування по збуренню. Вимірюється збурення і вводяться по результатах вимірюв. корективи в алгоритм керування, які компенсують відхилення алгоритму ф-кціонування що викликані збуренням.
![]()
3) Принцип зворотнього зв»язку, керування по відхиленню. В таких системах корективи в алгоритм керування вводяться по фактичному значенню вихідної величини.
Системи, в яких використовують керування по відхиленню назив. замкнутими.
![]()
Система
стабілізації U синхр. генератора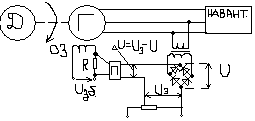
Комбіновані САК – це системи в яких використав. Керування по відхиленні і керування по збуренні.
2. Структура систем автоматичного керування
С АК – сукупність об»акта керування і технічного пристрою.
Dy – вихідна ( керована) величина, яка х-зує стан об»акта керування.
U – керуюча дія
f – забруднення, яке змінює стан об»акта перешкоджаючи керуванню.
Xз – задаюча дія, яка містить інформацію про необхідне значення вихідної величини y, тобто про мету керування.
Функціональна схема системи автоматичного керування:
![]()
4П – чутливий пристрій ( вимірний пристрій) , призначений для вимірюв. сигналів, які подаються на кер. пристрій.
ОП – обчислювальний пристрій реалізує алгоритми роботи керуючого пристрою .
ВП – виконавчі пристрої призначені для безпосереднього керування об»єктом, тобто зміни, його стану, відповідності сигналу, який видає його обчисл. пристрій
5. Основні закони регулювання
Законом керування - наз. математична залежність у відповідності з якою керуюча дія на об’єкт вироблялася без інерційним керуючим пристроєм.
Відносні безрозмірні змінні:
![]()
Керуюча дія:
![]()
Xб,Uб – деякі базові величини
Закони управління:
1.Пропорційний
закон
![]()
(Керуюча дія пропорц. сигналу розрядження)
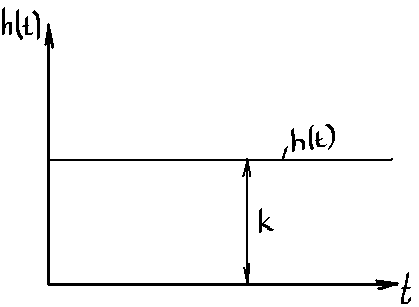 Kp
– коефіцієнт передачі регулятора
Kp
– коефіцієнт передачі регулятора
2.Інтегральний
закон
![]()
Ti –стала часу інтегрування
Інтегральний регулятор – астатичний, його використав. Для підвищення точності систем автоматичного керування
1.Пропорційно
інтегральний
![]()
2.Пропорційно
диференціююча
![]()
![]() -
використав. для покращення якості
керування
-
використав. для покращення якості
керування