

26. Передавальна функція паралельно з’ єднаних ланок.
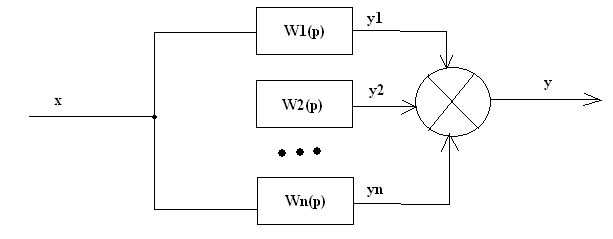
Передаточна функція паралельно з’єднаних ланок дорівнює сумі передавальних функцій цих ланок.
y1=W1(p)*x
y2=W2(p)*x
y3=W3(p)*x
y=y1+y2+…+yn=W1(p)*x+W2(p)*x+…+Wn(p)*x=(W1(p)+W2(p)+…+Wn(p))*x=W(p)*x
![]()
27. Ланки охоплені зворотнім зв’язком.
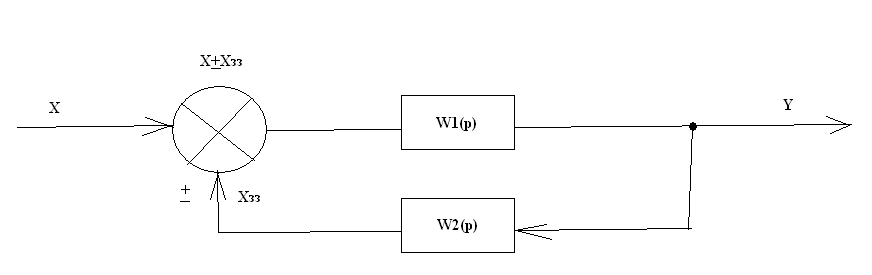
y=W1(p)(x±xзз)
хзз – сигнал зворотнього зв’язку
хзз =W2(p)*y
y=W1(p)*x±W1(p)*W2(p)*y
![]()
W3(p)=,
де W(p)=W1(p)*W2(p) – передавальна функція розімкненої системи приведеної до одно контурної
«-» - знак мінус відповідає додатному зворотньому зв’язку (в знаменнику передавальної функції із зворотнього зв’язку)
«+» - від’єьному зворотньому зв’язку.
У замкнутих САК замикання системи, що дає змогу забезпечити надходження на вхід системи сигналу пропорційного вихідній величині системи, виконується за допомогою зворотного зв’язку. Визначають додатні й від’ємні зворотні зв’язки.
Додатним зворотним зв’язком називають зв’язок, дія якого зберігається за знаком із дією вхідної величини на систему (або на окрему ланку),тоді це зображується в колі знаком “плюс”.
Від’ємним зворотним зв’язком називають зв’язок, дія якого протилежна за знаком із дією вхідної величини на систему (окрему ланку), а в колі це зображується знаком “мінус”. Від’ємні зворотні зв’язки в замкнутих САК позитивно впливають на стабілізацію перехідних процесів, тому для САК технологічними процесами систем ВП та ВВ доцільно застосовувати замкнуті САК з від’ємними зворотними зв’язками.
Знаючи правила перетворення структурних схем САК, досить просто розв’язувати завдання перетворення одноконтурних і багатоконтурних систем. При цьому під одноконтурною замкнутою САК розуміють систему, при розмиканні якої в довільній точці дістають ланцюжок ланок, в якому відсутні паралельно з’єднані ланки і ланки, охоплені зворотними зв’язками. Багатоконтурною замкнутою САК називають систему, яка має у своєму складі паралельно з’єднані ланки, а також ланки із зворотними зв’язками.
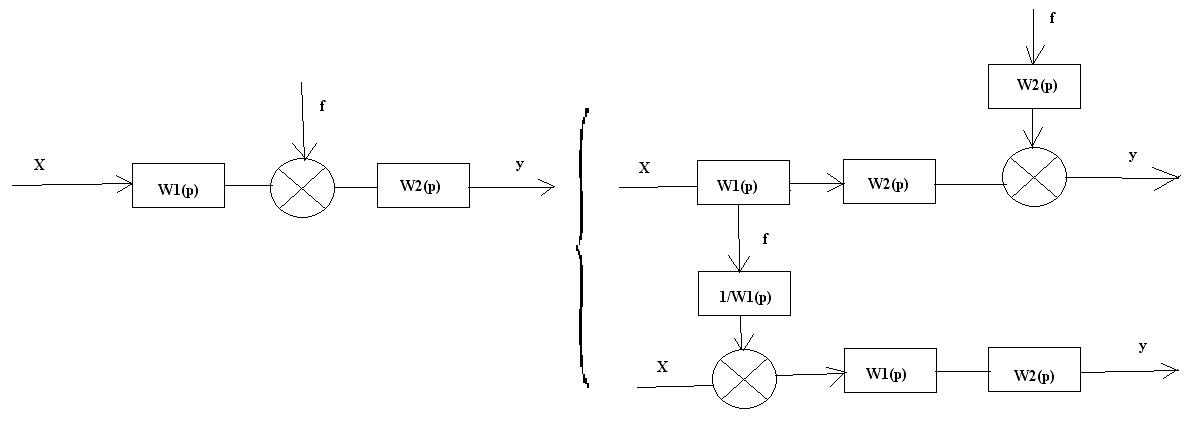
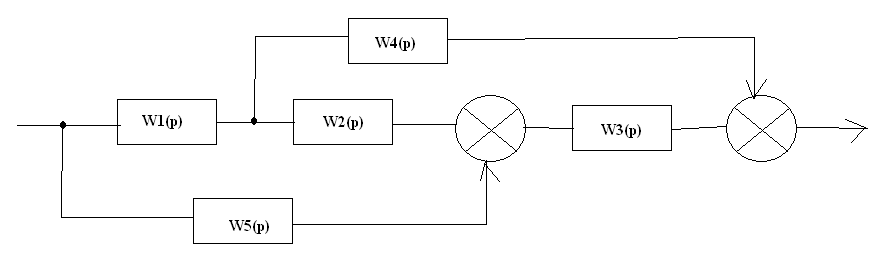
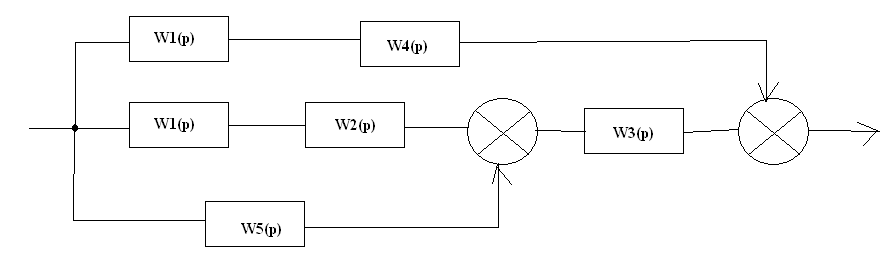
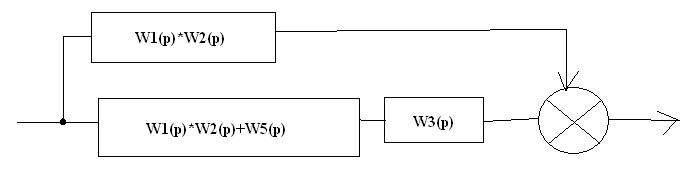
28. Правила переносу вхідних і вихідних сигналів в структурних схемах.
Правила переносу елемента сумування
Перенесення точки розгалуження
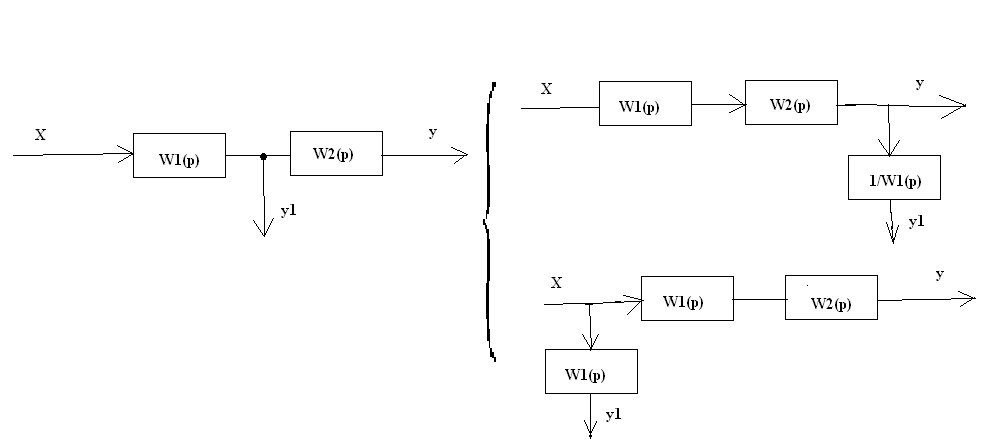
Приклад

29. Побудова частотних характеристик системи по частотних характеристиках ланок.
Побудова асимптотичної логарифмічної амплітудної характеристики системи при послідовному з’єднанні ланок. Спочатку відкладають координати спільної ЛАХ при w=1 рівну 20lgk, де k – коефіцієнт передачі послідовно з’єднаних всіх ланок.
k=k1*k2*k3*…*kl
Через
отриману точку проводять асимптоту з
нахилом 20(m-r)![]() , де m
– к-ть диференціюючих ланок; r
– к-ть інтегруючих ланок. Після чого на
осі абсцис відкладають значення спряжених
частот
, де m
– к-ть диференціюючих ланок; r
– к-ть інтегруючих ланок. Після чого на
осі абсцис відкладають значення спряжених
частот ![]() ,
де Тk
– постійні часу ланок. Перша асимптота
проводиться від осі ординат до найменшої
спряженої частоти. В цій точці проводять
її злом з зміною нахилу у відповідності
з типом ланки, якій належить дана спряжена
частина. Таким же чином характеристика
продовжується в сторону збільшення
частот, змінюючи їх нахил в кожній
спряженій частині.
,
де Тk
– постійні часу ланок. Перша асимптота
проводиться від осі ординат до найменшої
спряженої частоти. В цій точці проводять
її злом з зміною нахилу у відповідності
з типом ланки, якій належить дана спряжена
частина. Таким же чином характеристика
продовжується в сторону збільшення
частот, змінюючи їх нахил в кожній
спряженій частині.