

7. Розбивання системи на ланки.
В ТАК розглядають 2 задачі:
- задача аналізу – задана система і значення її параметрів.Необхідно визначити властивість системи.
- задача синтезу – задані властивості системи. Необхідно створити ситему що задовольнятиме ці властивості.
Послідовність дослідження системи:
- створюють математ модель або матем опис системи.
- досліджують усталені режими системи.
- досліджують перехідні процеси сист.
Ланка направленої дії – ланка що передає дію тільки в одному напрямі, з входу на вихід і така ланка не має впливу на стан попередньої ланки.
Структурна схема системи стабілізації напруги синхронного генератора:
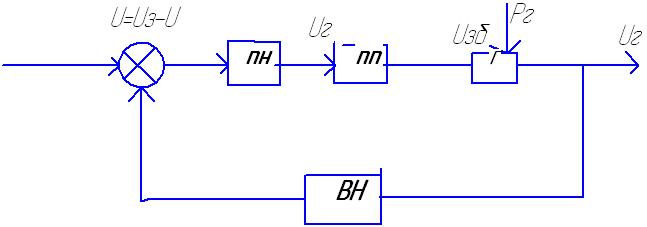
ПН- підсилювач напруги
ПП- підсилювач потужності
Г генератор
Рг- збудження у вигляді зміни навантаження на затискачах генератора.
ВН- вимірювач напруги
8. Основні властивості перетворення Лапласа.
Перетворення
Лапласа-
співвідношення![]() , яке ставить у відповідність функцію
дійсної змінної
, яке ставить у відповідність функцію
дійсної змінної ![]() функцію комплексної змінної
функцію комплексної змінної ![]() .
.
![]() оригінал,
-
зображення по Лапласа.
оригінал,
-
зображення по Лапласа.![]() .
.
![]() .
L-
умовний символ перетворення Лапласа.
.
L-
умовний символ перетворення Лапласа.
Зворотнє перетворення Лапласа-
![]() ,
,
![]()
ВЛАСТИВОСТІ ПЕРЕТВОРЕННЯ ЛАПЛАСА:
-лінійності:
![]()
-диференціювання оригіналу (зображення похідної)
![]()
У
випалку коли початкові умови = 0 :
![]()
![]() -
перетворення
Лапласа n-го порядку.
-
перетворення
Лапласа n-го порядку.
-Перетворення лапласа одиничної сходинкової дії і одиничного імпульсу:
![]() -
одинчної дії(одиничного скачка).
-
одинчної дії(одиничного скачка).
![]() -
одиничного імпульсу.
-
одиничного імпульсу.
Інтегрування оригіналу :
Якщо
треба знайти перетворення
![]()
Теорема про граничні значення
![]() ,
,
![]() .
.
Теорема розкладу:
 .
.
Де Sk -корені рівняння
![]()
![]() -
число різних коренів
-
число різних коренів
![]() -кратність
коренів Sk
.
-кратність
коренів Sk
.
9. Форма запису лінійних диференціальних рівнянь.
![]() -
власний оператор.
-
власний оператор.
![]() -
оператор дії.
-
оператор дії.
![]() -
диф. р-ня в операторній формі.
-
диф. р-ня в операторній формі.
10. Передавальні функції.
Передавальні функції- це відношення оператора дії до власного оператора,називається передавальною функцією в операторній формі.
![]() -
передавальні ф-ції
-
передавальні ф-ції
![]() -
пердавальна функція за вхідною дією.
-
пердавальна функція за вхідною дією.
![]() -
передавальна ф-ція по збуренню.
-
передавальна ф-ція по збуренню.
![]() .
.
Передевальна функція в формі зображення Лапласа: називається відношення зображення вихідної
величини до зображення вхідної величини при нульових початкових умовах.
![]() -зображення
оригіналів .
-зображення
оригіналів .
![]() -по
вхідній дії.
-по
вхідній дії.
![]() -по
збуренню.
-по
збуренню.
Алгебраїчне р-ння через передавальні функції
![]()
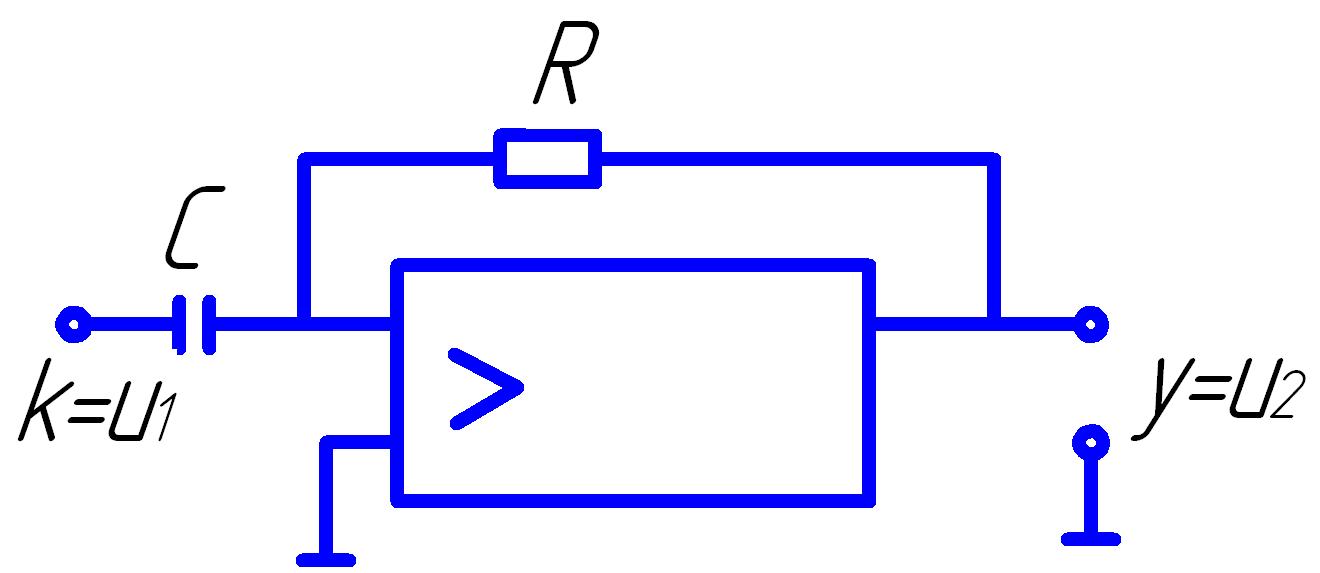
23. Ідеальна диференціююча ланка.
Рівняння
ланки:
![]()
Передавальна функція:
![]()
Приклад: тахогенератор ностійного струму, якщо а якості вхідної величини розглядати кут повороту ротора, а вякості вихідної е.р.с. якоря.
Операційний підсилювач в режимі диференціювання.
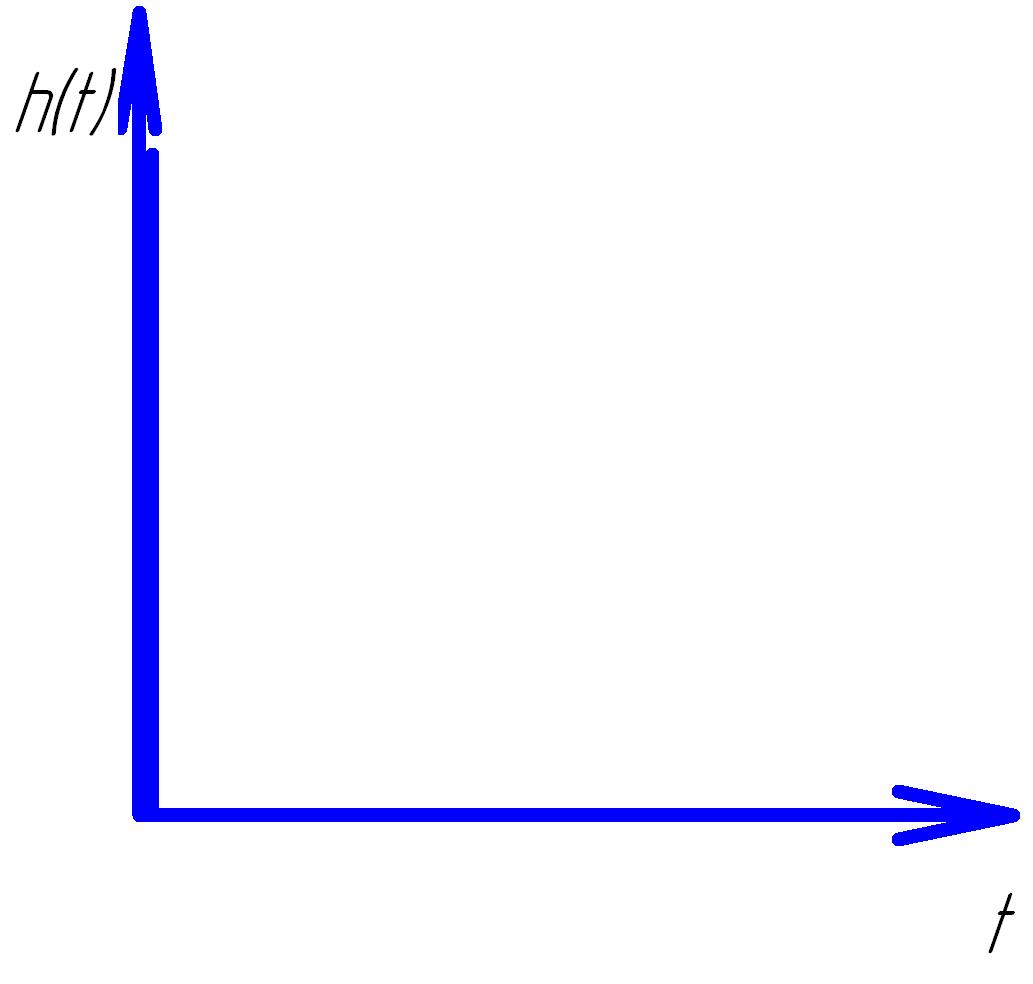
перехідна функція і хара-ктеристика:
![]()
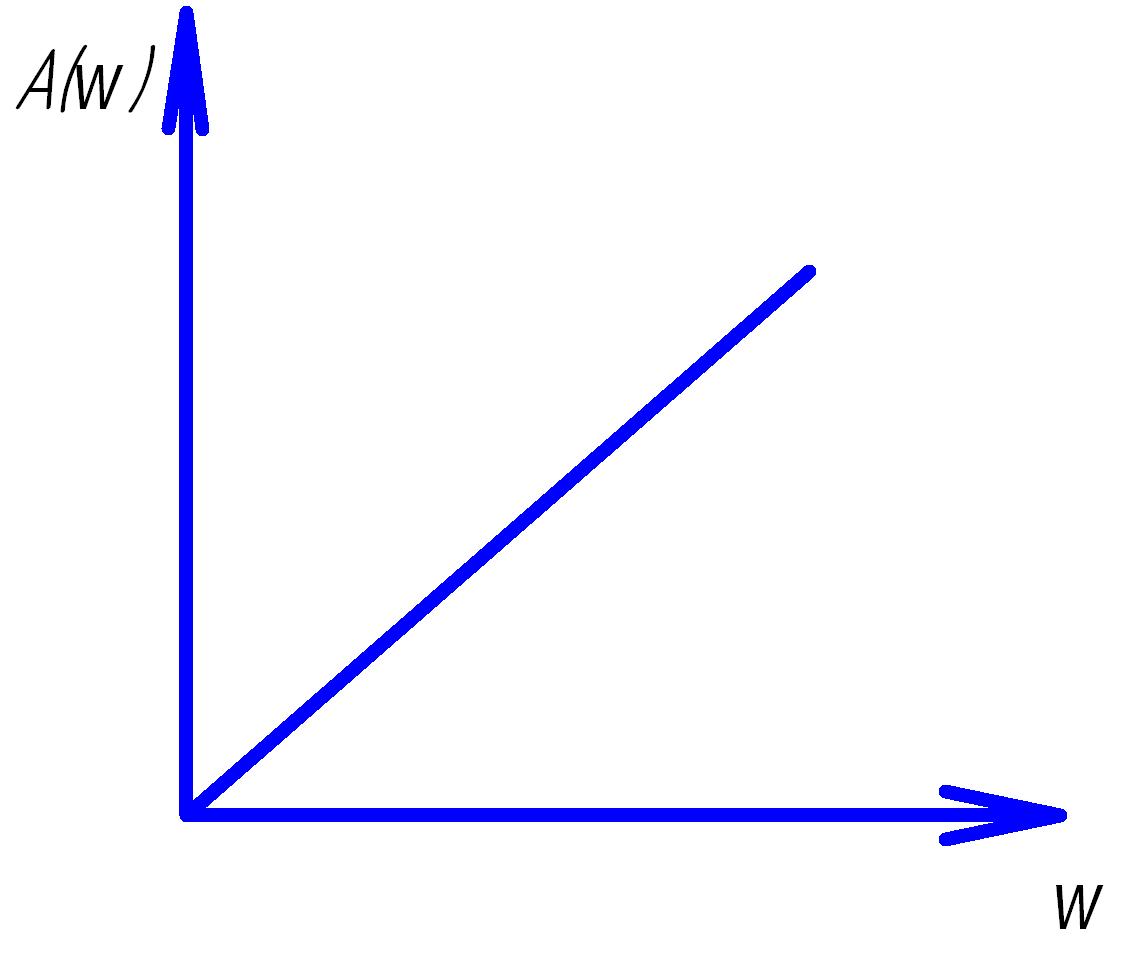
АЧФ і х-ка:
![]()
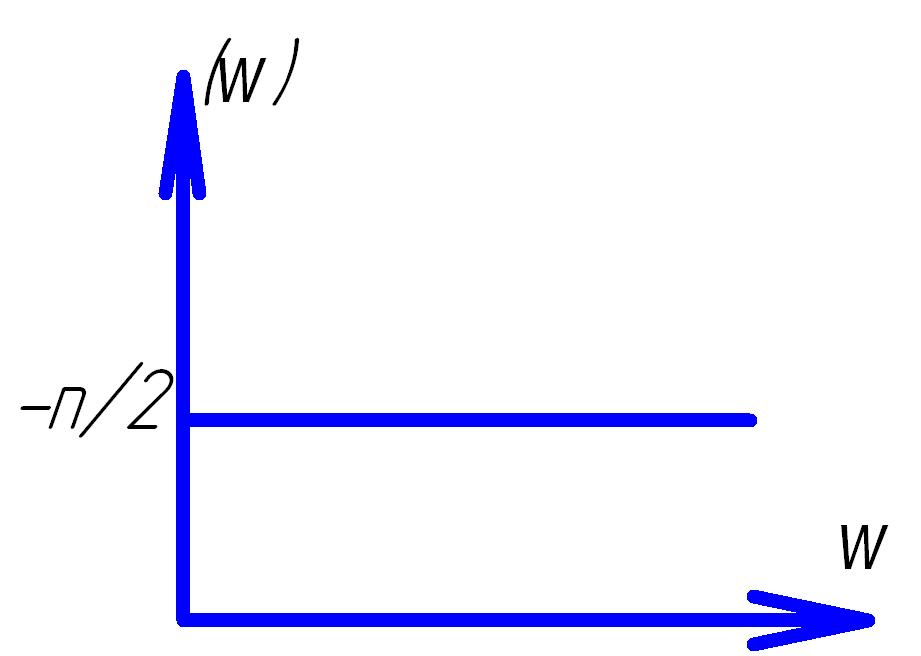
ФЧФ і х-ка
![]()
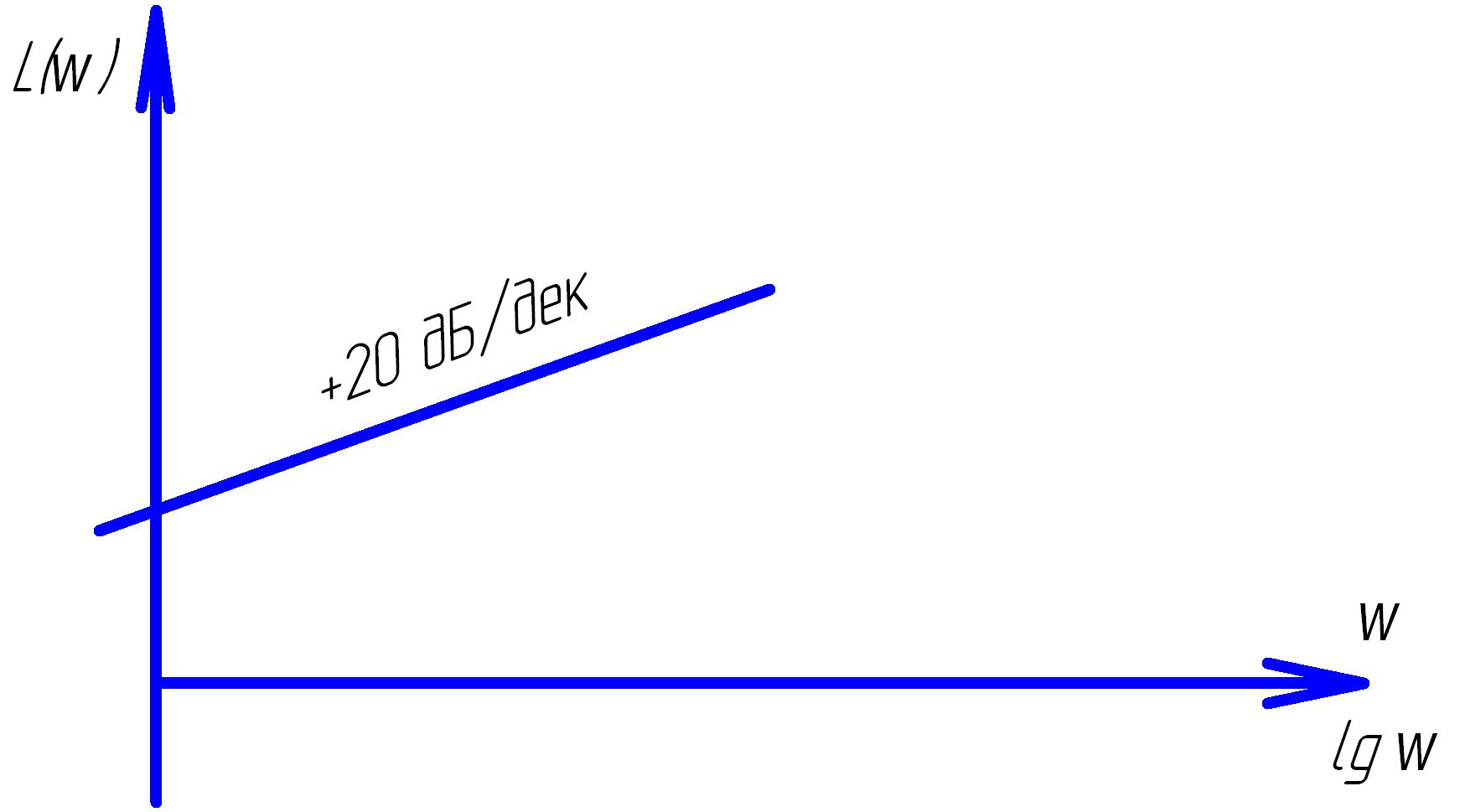
ЛАХ і х-ка:
![]()
Імпульсна перехідна фу-нкція і характеристика:
![]()
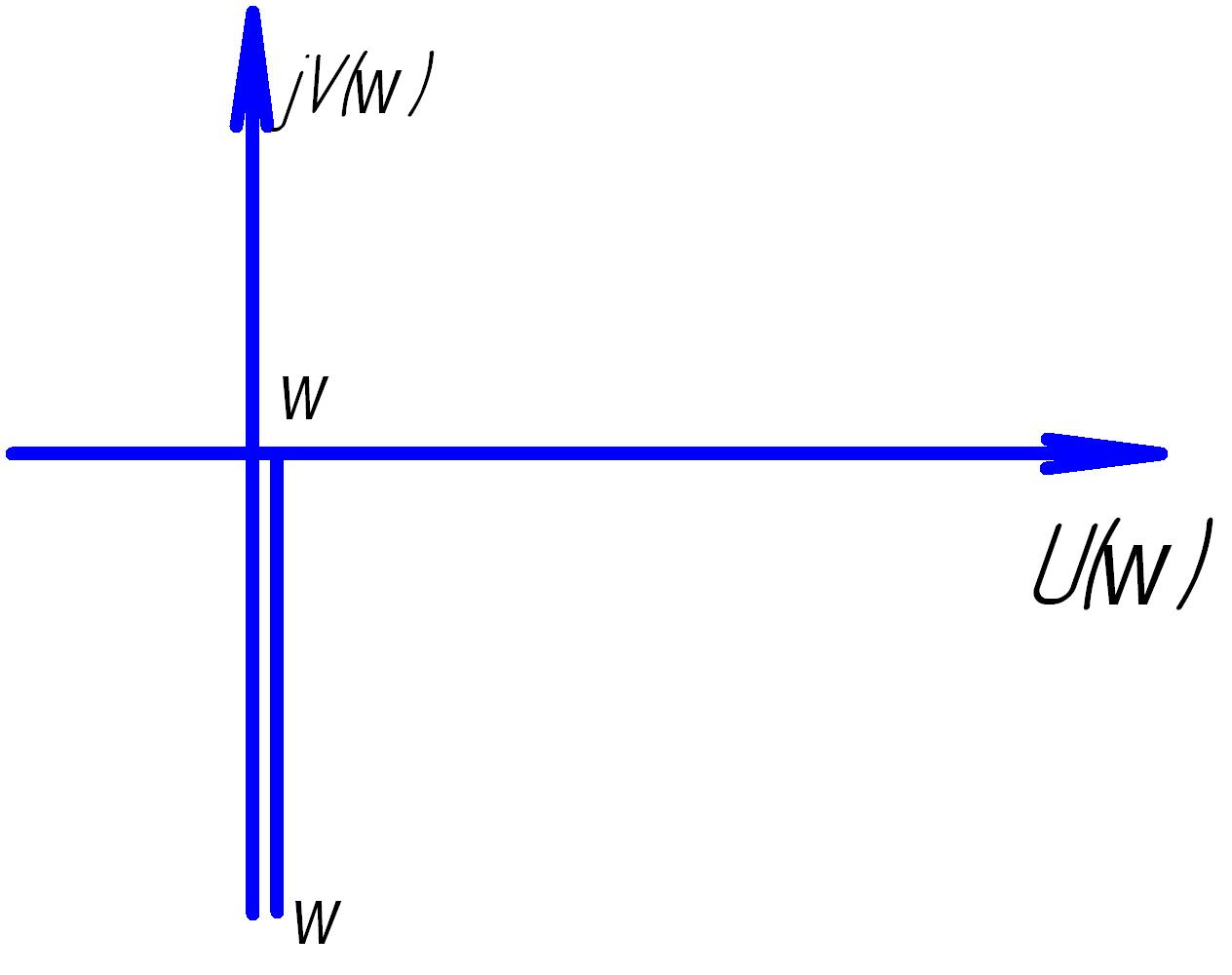
АФЧФ і х-ка
![]()
1.Основні поняття про автоматичне керування.
Керування – це така організація того чи іншого процесу, яка забезпечує досягнення визначеної цілі.
Обмежень на керування є 2 види:
-обмеження 1-го виду: це самі закони природи у відповідності з якими проходить рух системи керування.
-обмеження 2-го виду: викликані обмеженістю ресурсів, які використовуються при керуванні.
Фізична система в якій ми керуємо назив. об»єктом керування.
Об»єктами можуть бути:
1.Технічні пристрої (автомобілі, верстати)
2.Виробничі підприємства (відділ, цех, завод)
3.Економічні системи (економ. підприємства, економ. галузі, економ. Держави.)
4.Біологічні системи ( наш організм)
5.Соціальні системи.
Технічний пристрій з допомогою якого здійснюється автоматичне керування назив. Техн.. пристрій.
С![]() АК
– сукупність об»акта керування і
технічного пристрою.
АК
– сукупність об»акта керування і
технічного пристрою.
Dy – вихідна ( керована) величина, яка х-зує стан об»акта керування.
U – керуюча дія
f – забруднення, яке змінює стан об»акта перешкоджаючи керуванню.
Xз – задаюча дія, яка містить інформацію про необхідне значення вихідної величини y, тобто про мету керування.