

32. Поняття про стійкість.
Стійкість – це властивість системи вертатися у попередній стан або близький до нього усталений режим після будь-якого виходу із цього режиму в результаті будь-якої дії.
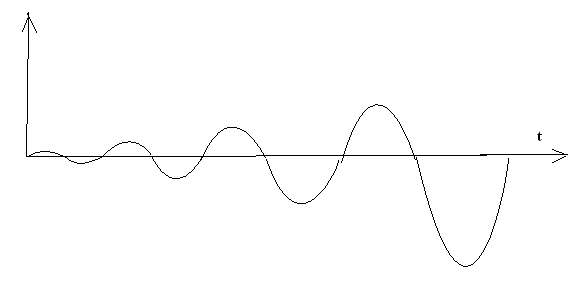
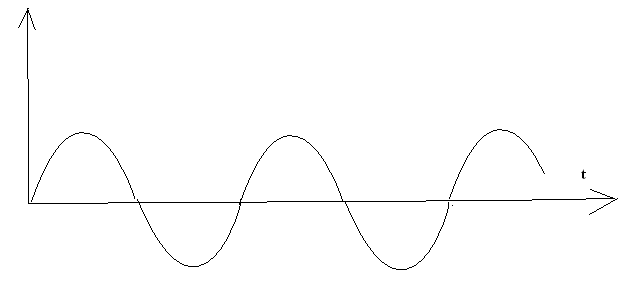
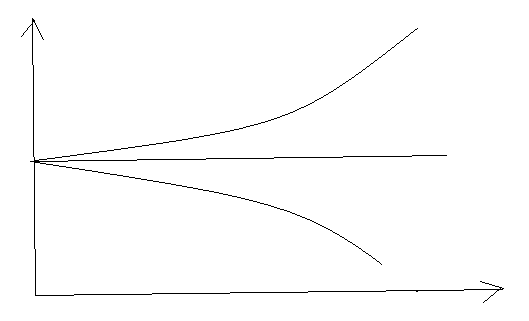
НЕ стійкі системи:

Перехід від одного усталеного режиму до іншого:
y=W3(p)*x
W3(p)=
Wxy(p)=; W(p)=
W3(p)=
Y=
D(p)Y=M(p)X
(a0pn+a1pn-1+…+an-1p+an)y=(b0pm+b1pm-1+…+bm)x
Загальний розв’язок рівняння
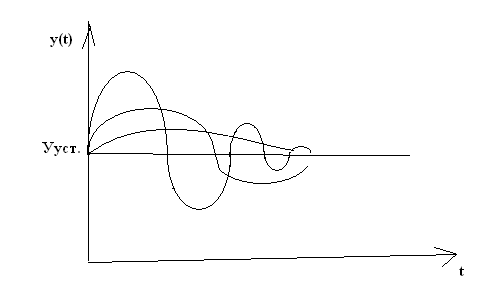
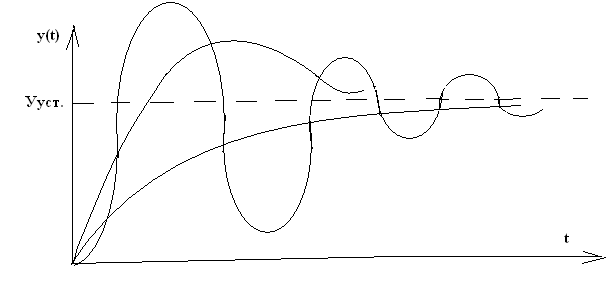
y(t)=yуст.( t)+уп( t)
yуст.( t) – це частковий розв’язок неоднорідного рівняння з правою частиною, що описує вимушений режим, який встановлюється після закінчення перехідного процесу.
уп( t) – загальний розв’язок однорідного рівняння D(p)y=0, що описує перехідний процес, який викликаний певною дією.
Таким чином умовою стійкості САК при t→∞; уп(t)→0.
Розв’язок неоднорідного рівняння буде мати вигляд:
Уп(t)=![]() ,
,
де n – порядок х-того рівняння; сі – постійні інтегрування, які визначаються початковими умовами та збуреннями; λі – корені х-того рівняння D(λ)=0 коли р= λ (s=λ).
λ i,i+1=αi±jβi
cie (αi+jβi)t+ cie (αi-jβi)t=cieαit(ejβit +e-jβit )= cieαitsin(βit+φi)
c1eλ1t+ c2eλ2t

λ1,2= αi±jβi
α<0
c1eλ1t+ c2eλ2t
λ1,2= αi±jβi
α>0
c1eλ1t+ c2eλ2t
λ1,2= αi±jβi
α=0
c1eλ1t α >0
α=0
α<0 β=0
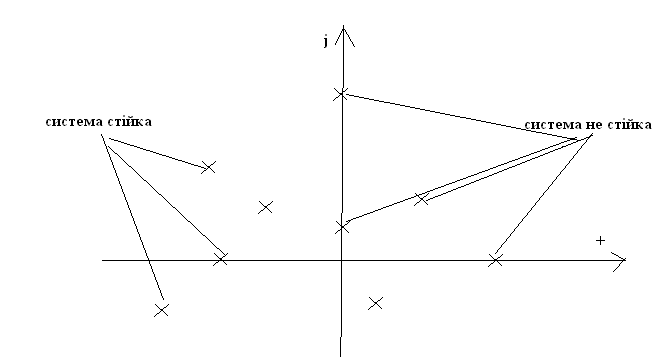
Таким чином умовою стійкості лінійної САК є те, що всі корені характеристичного рівняння повинні мати від’ємну дійсну частину. αі <0
6. Загальні характеристики процесів САК.
Стійкість - це властивість системи повертатись в установлений стан після того, як вона(система) була виведена з цього стану яким - небудь збуренням. Це основна властивість САК вона є роботоздатністю ситеми.
Стійкість САК є необхідною умовою можливості системи виконувати поставлені перед нею завдання. У теорії автоматичного керування розроблено методи, що дозволяють досліджувати стійкість САК без знаходження коренів характеристичного рівняння, які дістали назву критеріїв стійкості. Існують два основних види критеріїв стійкості: алгебраїчні й частотні. До алгебраїчних критеріїв стійкості належать критерії Вишнеградського, Рауса, Льєнара, Мінара, Гурвіца та ін., що дозволяють оцінювати стійкість САК за коефіцієнтами характеристичного рівняння цієї системи. До частотних критеріїв стійкості лінійних неперервних САК належать критерії Михайлова, Найквіста, логарифмічні й метод Д-розбиття
Стійкість непрерервних лінійних САК є необхідним, але недостатнім показником розв’язання завдання автоматичного керування об’єктом. Розглядають також інші показники, що об’єднують єдиним поняттям – “якість САК”. Якість системи оцінюють багатьма показниками, серед яких основними є: характер перехідного процесу, тривалість перехідного процесу, перекерування, точність (похибка) системи
Якість перехідного процесу характеризується тим наскільки процес керування близький до бажаного.
Точність керування характериз. похибкою системи в усталених режимах. Точність САК визначається величиною похибок, що залежить від режиму роботи системи, а тому існують два види похибок – статичні й динамічні.