

3 Сложение пар сил и Условия равновесия пар сил
Рассмотрим сложение двух пар сил, расположенных в пересекающихся плоскостях, и докажем следующую теорему: геометрическая сумма моментов составляющих пар сил равна моменту эквивалентной им пары.
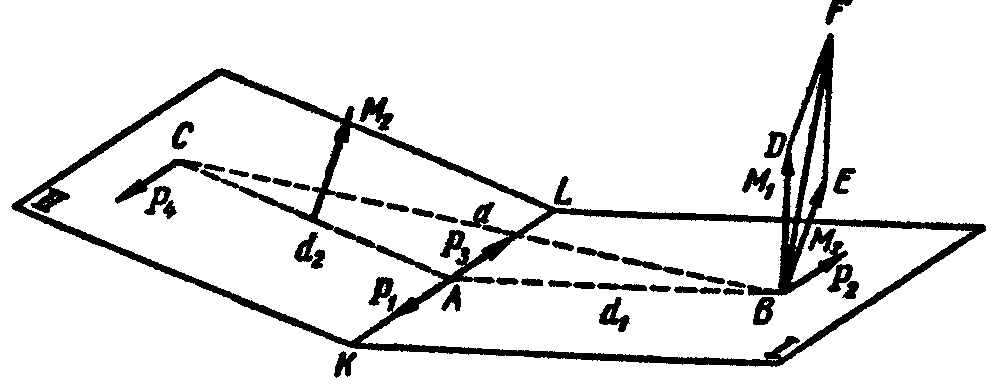
Рис. 3.13
Пусть
требуется сложить две пары сил,
расположенные в пересекающихся
плоскостях 1 и 2 и имеющие моменты
![]() и
и
![]() (рис. 3.13). Выбрав силы этих пар равными
по модулю
(рис. 3.13). Выбрав силы этих пар равными
по модулю
![]() ,
,
определим плечи этих пар:
![]() и
и
![]() .
.
Расположим
эти пары сил таким образом, чтобы силы
![]() и
и
![]() были направлены
по линии пересечения плоскостей KL
в противоположные стороны и
уравновешивались. Оставшиеся силы
были направлены
по линии пересечения плоскостей KL
в противоположные стороны и
уравновешивались. Оставшиеся силы
![]() и
и
![]() образуют
пару сил,
эквивалентную данным двум парам сил.
Эта пара сил
имеет
плечо
ВC=d
и момент,
перпендикулярный плоскости действия
пары сил,
равный по
модулю М
= Pd.
образуют
пару сил,
эквивалентную данным двум парам сил.
Эта пара сил
имеет
плечо
ВC=d
и момент,
перпендикулярный плоскости действия
пары сил,
равный по
модулю М
= Pd.
Покажем, что геометрическая сумма моментов составляющих пар сил, равна моменту эквивалентной пары. Так как момент пары сил является свободным вектором, перенесем моменты составляющих пар сил и в точку В и сложим их, построив на этих моментах параллелограмм.
Докажем,
что диагональ
![]() =
+
представляет собой момент эквивалентной
пары
,
.
Для этого
необходимо доказать, что:
=
+
представляет собой момент эквивалентной
пары
,
.
Для этого
необходимо доказать, что:
1) BF = Pd;
2) отрезок BF перпендикулярен плоскости действия эквивалентной пары сил;
3) смотря навстречу вектору , можно видеть пару , стремящейся вращать плоскость в сторону, обратную вращению часовой стрелки.
Д о к а з а т е л ь с т в о.
Треугольники ВАС и BDF подобны, так как
![]() ;
;
![]() т.
е.
т.
е.
![]() .
.
и
![]() BDF=
ВАС
как углы с взаимно перпендикулярными
сторонами. Из подобия этих треугольников
следует, что
BDF=
ВАС
как углы с взаимно перпендикулярными
сторонами. Из подобия этих треугольников
следует, что
![]() т.
е.
т.
е.
![]() ,
,
откуда
![]() .
.
Так как вектор момента каждой пары сил перпендикулярен плоскости действия этой пары сил, то
![]() и
и
![]() ,
,
а
поэтому плоскость параллелограмма BDFE
перпендикулярна
силе
пары
и
![]() .
.
Кроме
того,
DBA
=90° и
СВА
=
FBD,
откуда
CBF
=90°, т.е. BF![]() ВС.
ВС.
Так
как диагональ параллелограмма BF
перпендикулярна силе пары
![]() и плечу
пары сил ВС,
то она перпендикулярна плоскости
действия эквивалентной пары сил.
и плечу
пары сил ВС,
то она перпендикулярна плоскости
действия эквивалентной пары сил.
3.
Выполнение третьего условия показано
на рисунке 3.13. Смотря навстречу вектору
BF,
можно видеть пару
![]() стремящейся вращать плоскость ее
действия в сторону, обратную вращению
часовой стрелки.
стремящейся вращать плоскость ее
действия в сторону, обратную вращению
часовой стрелки.
Из
выше изложенного следует, что вектор
![]() ,
т. е. геометрическая сумма моментов
составляющих пар сил равна моменту
эквивалентной им пары сил:
,
т. е. геометрическая сумма моментов
составляющих пар сил равна моменту
эквивалентной им пары сил:
![]() .
.
Установленное правило сложения моментов пар сил называется правилом параллелограмма моментов. Построение параллелограмма моментов можно заменить построением треугольника моментов.
Применяя построение параллелограмма или треугольника моментов, можно решить и обратную задачу, т. е. разложить любую пару сил на две составляющие.
Пусть требуется сложить несколько пар сил, расположенных произвольно в пространстве (рис. 3.14). Определив моменты этих пар, их можно перенести в любую точку О пространства. Складывая последовательно моменты этих пар сия, можно построить многоугольник моментов пар, замыкающая сторона которого определит момент эквивалентной им пары сил.
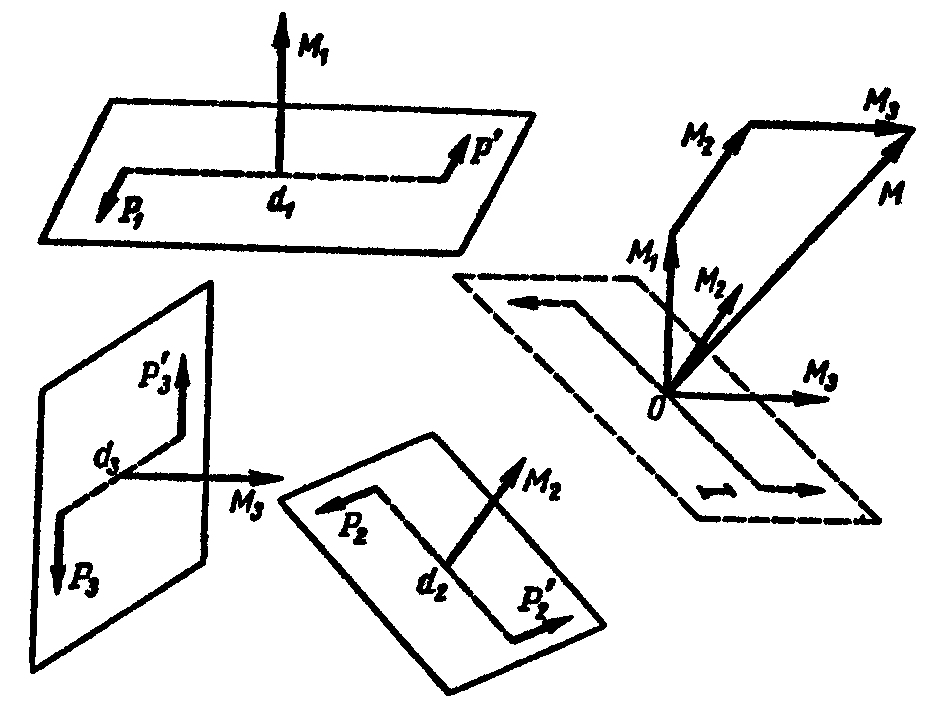
Рис. 3.14
На рисунке 3.14 показано построение многоугольника моментов при сложении трех пар сил.
Момент пары сил, эквивалентной данной системе пар сил в пространстве, равен геометрической сумме моментов составляющих пар сил:
![]() ,
,
или
![]() .
(3.8)
.
(3.8)
Плоскость 1 действия этой пары сил перпендикулярна направлению ее момента . Если момент эквивалентной пары сил равен нулю, то пары сил взаимно уравновешиваются:
![]() .
(3.9)
.
(3.9)
Таким образом, условие равновесия пар сил, произвольно расположенных в пространстве, можно сформулировать так: пары сил, произвольно расположенные в пространстве, взаимно уравновешиваются в том случае, если геометрическая сумма их моментов равна нулю.

Рис. 3.15
Если пары сил расположены в одной плоскости (рис. 3.15), то моменты этих пар сил, направленные по одной прямой, складываются алгебраически.
Момент пары сил, эквивалентной системе пар сил на плоскости. равен алгебраической сумме моментов составляющих пар:
![]() ,
,
где
![]() .
.