

Способ вырезания узлов
Рассмотрим определение усилий в стержнях фермы по способу вырезания узлов. Этот способ состоит в том, что мысленно вырезают узлы фермы, прикладывают к ним соответствующие внешние силы и реакции стержней и составляют уравнения равновесия сил, приложенных к каждому узлу. Так как в начале расчета фермы неизвестно, какие стержни фермы растянуты и какие сжаты, то условно предполагают, что все стержни растянуты (реакции стержней направлены от узлов).
Если в результате вычислений получают ответ со знаком минус, то соответствующий стержень сжат. Найденные реакции стержней равны по модулю внутренним усилиям в стержнях.
Последовательность рассмотрения узлов определяется обычно условием, что число неизвестных сил, приложенных к узлу, не должно превышать числа уравнений равновесия сил (двух для плоской фермы и трех для пространственной). Тогда эти неизвестные определяются сразу из уравнений равновесия сил, действующих на этот узел.
Если ферма плоская, то можно проверить правильность вычислений, построив многоугольники сил, приложенных к ее узлам. Эти многоугольники должны быть замкнутыми.
Усилия в отдельных стержнях загруженной фермы могут оказаться равными нулю. Такие стержни принято называть нулевыми. Рассмотрим леммы, пользуясь которыми можно определить нулевые стержни плоской фермы, не производя ее расчета.

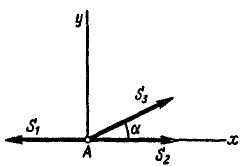
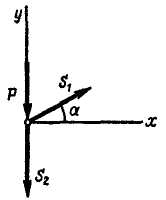
Рис. 5.5 Рис. 5.6 Рис. 5.7
Л е м м а 1. Если в незагруженном узле плоской фермы сходятся два стержня, то усилия в этих стержнях равны нулю (рис. 5.5):
![]()
Л е м м а 2. Если в незагруженном узле плоской фермы сходятся три стержня, из которых два расположены на одной прямой, то усилие в третьем стержне равно нулю. Усилия в первых двух стержнях равны между собой (рис. 5.6):
![]()
Л е м м а 3. Если в узле плоской фермы сходятся два стержня и к узлу приложена внешняя сила, линия действия которой совпадает с осью одного из стержней, то усилие в этом стержне равно по модулю приложенной силе, а усилие в другом стержне равно нулю (рис. 5.7):
![]()
Основываясь на результатах расчета, можно установить следующее:
1. Если в незагруженном узле фермы сходятся три стержня, не лежащих в одной плоскости, то усилия в каждом из этих стержней равны нулю.
2. Если в некотором узле фермы все внешние силы и все стержни, кроме одного, лежат в одной плоскости, то усилие в стержне, не лежащем в этой плоскости, равно нулю.
Эти соображения, дающие возможность без вычислений определить стержни с нулевыми усилиями, значительно упрощают определение усилий в стержнях пространственных ферм.
Задача
1. Определить
опорные реакции и усилия в стержнях
фермы, если
![]() =
20 Н,
=
20 Н,
![]() = 40 Н,
= 40 Н,
![]() = 30°, а
= 4 м
(рис. 5.8).
= 30°, а
= 4 м
(рис. 5.8).
Решение. Рассмотрим равновесие фермы, считая ее абсолютно твердым телом. Отбросим связи и заменим их реакциями связей.
На
опоре А
имеются две составляющие
![]() и
и
![]() ,
на опоре В
— одна составляющая
.
Для полученной уравновешенной плоской
произвольной системы сил составим три
уравнения равновесия и найдем реакции
связей:
,
на опоре В
— одна составляющая
.
Для полученной уравновешенной плоской
произвольной системы сил составим три
уравнения равновесия и найдем реакции
связей:
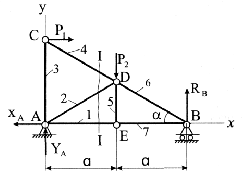
Рис. 5.8
![]() .
(5.1)
.
(5.1)
![]() .
(5.2)
.
(5.2)
![]() .
(5.3)
.
(5.3)
Находим из (5.1)
![]() ,
,
из (5.3)
 .
.
из (5.2)
![]() .
.
Определение усилий в стержнях начинаем с узла В (рис. 5.9), где число неизвестных равно двум. Составим для узла В два уравнения равновесия в проекции на оси х и у. Направление осей показано на рис. 5.8.
![]() .
(5.4)
.
(5.4)
![]() .
(5.5)
.
(5.5)
Находим из (5.5)
![]() ,
,
из (5.4)
![]()
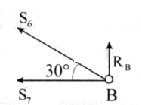
Рис. 5.9
.
Рассмотрим
узел Е
(рис. 5.10). Составим два уравнения
равновесия, учитывая, что
![]() :
:
![]() .
(5.6)
.
(5.6)
![]() .
(5.7)
.
(5.7)
Находим из (5.6)
![]() .
.
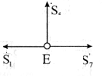
Рис. 5.10
Рассмотрим узел С (рис. 5.11). Составим два уравнения равновесия:
![]() .
(5.8)
.
(5.8)
![]() .
(5.9)
.
(5.9)
Находим из (5.8)
![]() ,
,
из (5.9)
![]() .
.
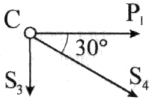
Рис. 5.11
Рассмотрим
узел А
(рис. 5.12). Составим одно уравнение
равновесия, учитывая, что
![]() .
.
![]() .
(5.10)
.
(5.10)
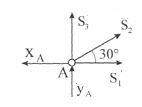
Рис. 5.12
Находим
![]() .
.
Таблица 5.1
Результаты вычислений
Параметр |
Номер стержня |
||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Знак усилия Усилие, Н |
+ 54.65 |
- 40 |
+ 11.55 |
- 23.1 |
0 |
- 63.1 |
+ 54.65 |
Минус показывает, что стержни 2, 4, 6 сжаты, а не растянуты, как предполагалось.