

4 Передаточные механизмы
Передаточные механизмы предназначены для передачи вращения от одною вала. называемого ведущим, к другому, называемому ведомым. Если оси ведущего и ведомого валов параллельны или пересекаются, то вращение можно передать с помощью фрикционной или зубчатой передачи (рис. 10.8 – 10.11).
Во фрикционной передаче вращение передается вследствие действия силы сцепления на поверхности соприкасающихся колес, в зубчатой передаче - от зацепления зубьев. Вращательная скорость в точке соприкасания колес относится к точкам обоих колес, т. е. ее модуль определяется как
![]() .
.
откуда
![]() .
.
Таким образом, угловые скорости колес фрикционной или зубчатой передачи обратно пропорциональны радиусам колес.
Отношение угловой скорости ведущего колеса к угловой скорости ведомого колеса называется передаточным числам:
![]() .
.

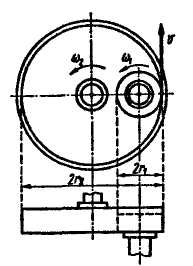
Рис. 10.8 Рис. 10.9
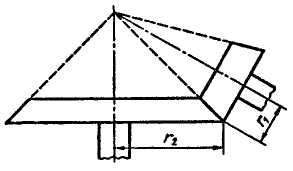

Рис. 10.10 Рис. 10.11
Передаточное число можно вычислить как обратное отношение радиусов колес:
![]() .
.
Так как числа зубьев пропорциональны длинам окружностей и, следовательно, радиусам, то передаточное число определяется и по числу зубьев:
![]() .
.
При внешнем зацеплении (рис. 10.8) направление вращения ведущего и ведомого колес противоположное, а при внутреннем (рис. 10.9) - одинаковое.
Кроме фрикционной и зубчатой передач существует передача на расстоянии с помощью гибкой связи (ремня, троса, цепи) (рис. 10.11).
Taк как скорости всех точек ремня одинаковы и ремень не скользит по поверхности шкива, то к ременной передаче относятся те же соотношения:
![]() .
.
Применяются также серии колес с неподвижными осями вращения в виде последовательного ряда с паразитными колесами (рис. 10.12) и последовательного ряда с кратным зацеплением (рис. 10.13), называемые рядовыми соединениями колес.
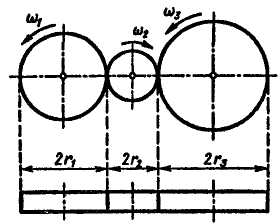
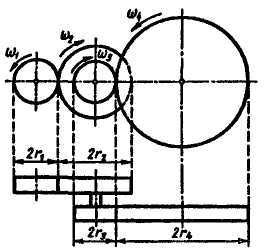
Рис. 10.12 Рис. 10.13
Определим передаточное число фрикционной передачи в виде рядового соединения с паразитными колесами:
для
колес 1-2
![]() ;
;
для
колес 2-3
![]() .
.
Перемножаем левые и правые части, получаем
![]() .
.
Для зубчатых колес
![]() .
.
Передаточное число рядового соединения с паразитными колесами равно отношению радиусов (чисел зубьев) ведомого и ведущего колес и не зависит от радиусов (чисел зубьев) паразитных колес.
Определим передаточное число рядового соединения с кратным зацеплением.
Частное передаточное число для колес 1-2
![]() .
.
Частное передаточное число для колес 3-4
![]() .
.
Так
как колеса 2—3 соединены жестко, т. е.
![]() то общее передаточное число
то общее передаточное число
![]() равно произведению передаточных чисел:
равно произведению передаточных чисел:
![]() .
.
Для зубчатых колес
![]() .
.
Таким образом, общее передаточное число рядового соединения колес с кратным зацеплением равно произведению чисел зубьев ведомых колес, деленному на произведение чисел зубьев ведущих колес.
В рассмотренных выше передачах при равномерном вращении ведущего вала ведомый вал вращается тоже равномерно.
Для получения переменной угловой скорости ведомого вала применяются передачи, в которых расстояние от точки соприкасания колес до оси одного из валов или обоих валов изменяется.
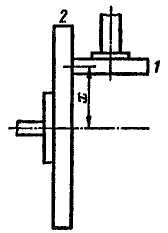
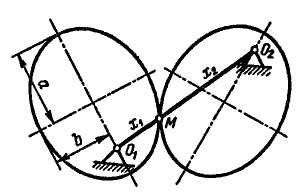
Рис. 10.14 Рис. 10.15
Во фрикционной передаче, изображенной на рис. 10.14, колесо 1 перемещается вдоль его оси и отношение угловых скоростей зависит от переменного расстояния х:
![]() .
.
На рис.10.15 изображены эллиптические колеса, оси вращения которых находятся в фокусах эллипсов. Отношение угловых скоростей зависит от переменных расстояний
![]() и
и
![]() ,
,
где
![]() .
.
Пример 1. Вал начинает вращаться равноускоренно из состояния покоя. В первые 20 с он совершает 100 оборотов. Каковы его угловые скорость и ускорение по истечении 20 с?
Решение.
Так как вал начинает вращаться из
состояния покое, то ω0=0.
В этом
случае уравнения
при
![]() имеют вид
имеют вид
![]() ,
,
![]() (1)
(1)
Из уравнения (1) находим
![]() ,
,
где
![]() .
.
![]()
Пример 2. Лебедка (рис. 2.2.1), поднимающая груз по наклонной плоскости, состоит из двух валов 1 л 2 с шестернями (зубчатыми колесами), числа зубьев которых равны соответственно z1 = 12 и z2= 48. К валу 2 прикреплен барабан радиусом r= 0,3 м, на который наматывается грузовой трос. Вал 1 вращается равноускоренно с угловым ускорением ε1 = 8 с–2. Определить скорость, ускорение и перемещение груза, а также ускорение точки В барабана в момент времени t = 1 с. В начальный момент времени система находилась в покое.
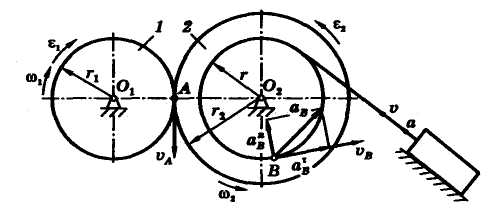
Рис. 2.2.1
Решение.
Найдем угловую скорость ω1
ведущего вала 1 из условия, что оно
вращается с угловым ускорением ε1
= const,
учитывая, что
![]() .
Интегрируя последнее уравнение по
времени, получаем
.
Интегрируя последнее уравнение по
времени, получаем
![]() .
.
Постоянную интегрирования получаем из начального условия: при t= 0 ω1 = 0 (система находилась в покое), следовательно C1 = 0.
Итак,
угловая скорость вала 1 определяется
уравнением
![]() .
.
При
t
= 1 с получаем
![]() .
.
Шестерни
1 и 2 взаимодействуют без проскальзывания.
Поэтому скорости точек их касания (точка
А)
будут одинаковы:
![]() .
.
Отсюда
находим угловую скорость ω2
вала 2, учитывая, что
![]() :
:
![]() .
.
Угловое
ускорение вала 2 равно
![]() .
.
Поскольку трос нерастяжим и относительно барабана не проскальзывает, то скорость груза v будет равна скорости любой из точек на ободе барабана, в частности, скорости точки В: v = vB = ω2r = 0,6t=|t=1 c =0,6 м/с.
Ускорение
точки В
равно векторной сумме касательного
(вращательного) и нормального
(центростремительного) ускорений:
![]() .
.
Направление
вращательного ускорения определяется
направлением углового ускорения ε2,
а его модуль равен
![]() м/с2.
Центростремительное ускорение направлено
к оси вращения вала 2 и равно по модулю
м/с2.
Центростремительное ускорение направлено
к оси вращения вала 2 и равно по модулю
![]() м/с2.
м/с2.
Модуль ускорения точки В
![]() м/с2.
м/с2.
Ускорение
груза можно найти, взяв производную по
времени от его скорости, так как это
касательное ускорение:
![]() м/с2.
м/с2.
Перемещение груза определяется интегрированием модуля скорости по времени:
![]() м.
м.
Ответ: v = 0,6 м/с; а = 0,6 м/с2; s = 0,3 м; аB = = 1,34 м/с2.
Пример
3. Маховик
радиусом R
= 0,5 м
вращается так, что его угловая скорость
меняется в соответствии с уравнением
![]() .
Для момента времени t
= 0,5 с
после начала движения определить
скорость и ускорение точки на ободе
маховика. Установить, за какое время
маховик сделает 100 полных оборотов.
.
Для момента времени t
= 0,5 с
после начала движения определить
скорость и ускорение точки на ободе
маховика. Установить, за какое время
маховик сделает 100 полных оборотов.

Рис. 2.2.2
Решение. Для момента времени t = 0,5 с получаем ω = 0,680 с–1, и скорость точки на ободе маховика равна v = ωR = 0,340 м/с.
Угловое ускорение маховика
![]() .
.
Ускорение
точки на ободе маховика равно сумме
двух составляющих ускорений:
![]() ,
где
и
,
где
и
![]() — касательное (вращательное) и
нормальное (центростремительное)
ускорения точки.
— касательное (вращательное) и
нормальное (центростремительное)
ускорения точки.
Учитывая,
что вращательное ускорение равно по
модулю
![]() ,
найдем
=0,680
м/с2;
центростремительное ускорение
,
найдем
=0,680
м/с2;
центростремительное ускорение
![]() .
Модуль полного ускорения точки
.
Модуль полного ускорения точки
![]() м/с.
м/с.
Направления скорости и ускорений показаны на рис. 2.2.2.
Поскольку значения величин угловой скорости и углового ускорения имеют одинаковые знаки, вращение тела ускоренное. Соответственно, совпадают по направлению угловая скорость и угловое ускорение тела, а также скорость точки и вращательное ускорение.
Поворот
маховика на 100 полных оборотов
соответствует углу его поворота φ
= 200π
рад.
Выражение для угла поворота найдем из
уравнения
![]() .
.
Имеем
![]() .
.
Итак,
![]() ,
откуда находим t
= 2,19 с.
,
откуда находим t
= 2,19 с.
Пример
4.
Вращение
маховика в
период пуска
машины определяется уравнением
![]() где t
– в
с,
φ
- в рад.
Определить модуль и направление
ускорения точки, отстоящей от оси
вращения на расстоянии
50 см,
в тот момент, когда ее скорость равна
8
м/с.
где t
– в
с,
φ
- в рад.
Определить модуль и направление
ускорения точки, отстоящей от оси
вращения на расстоянии
50 см,
в тот момент, когда ее скорость равна
8
м/с.

Рис. 2.2.3
Решение. По уравнению вращения маховика находим его угловые скорость и ускорение согласно формулам:
![]() (1)
(1)
![]() (2)
(2)
Пользуясь формулой, находим момент времени t1, когда скорость точки М равна 8 м/с:
![]()
По
этому значению
![]() из (1) находим
t1:
из (1) находим
t1:
![]()
По уравнению (2) вычисляем ε, а затем по формулам модули вращательного, центростремительного и полного ускорений точки М в этот момент времена:
Как видно, модуль полного ускорения точки весьма мало отличается от модуля центростремительного ускорения точки (рис. 2.2.3).
Направление ускорения точки определяется углом β, образованным ускорением и радиусом СМ:
![]()
Пример 5. Груз А, подвешенный к нити АВ, намотанной на барабан, опускается равноускоренно из состояния покоя, приводя во вращение барабан. За первые 3 с барабан совершает 9 оборотов. Определить в конце 5-й секунды скорость и ускорение точки обода барабана, а также груза А, если диаметр барабана D = 30 см (рис. 2.2.4, а).
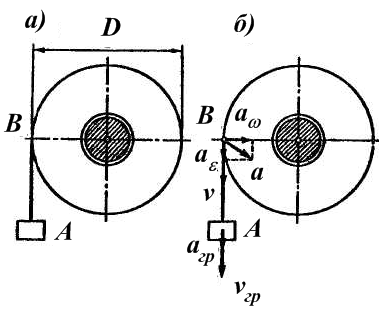
Рис. 2.2.4
Решение. Барабан вращается равноускоренно согласно уравнению:
![]() .
.
Формула угловой скорости имеет вид:
![]() .
.
Для
того чтобы начальное значение угла
поворота
![]() было равно нулю, следует неподвижную
полуплоскость поместить в начальном
положении подвижной полуплоскости,
вращающейся с барабаном. Выполним это
и получим
было равно нулю, следует неподвижную
полуплоскость поместить в начальном
положении подвижной полуплоскости,
вращающейся с барабаном. Выполним это
и получим
![]() .
.
При
вращении из состояния покоя начальная
угловая скорость барабана равна нулю
![]() .
При этих условиях
.
При этих условиях
![]() ;
(1)
;
(1)
![]() .
(2)
.
(2)
Так
как при t
= 3 с
![]() рад,
то из уравнения (1) определим угловое
ускорение
рад,
то из уравнения (1) определим угловое
ускорение
![]() :
:
![]() .
.
Из уравнения (2) найдем угловую скорость барабана в конце 5-й секунды:
![]() .
.
Определим в точке В обода барабана (рис. 2.2.4, б) модули вращательной скорости, вращательного и центростремительного ускорений в этот же момент времени по формулам:
![]()
![]()
(модуль вращательного ускорения точки тела при равнопеременном вращении одинаков для всех моментов времени);
![]() .
.
Модуль полного ускорения точки обода барабана определяется по формуле:
![]() .
.
Вследствие незначительной величины модуля вращательного ускорения по сравнению с модулем центростремительного ускорения полное ускорение приближенно равно центростремительному.
![]() .
.
Ускорение груза (рис. 2.2.4, б) равно вращательному ускорению точки обода:
![]() .
.
Пример 6. Центробежный регулятор вращается с постоянной угловой скоростью ω вокруг вертикальной оси. Угол АСВ равен 60о, а ускорение шаров А и В равно по величине 100g, где g=980 см/с2. Стержни АС, ВС, АD и BD одинаковой длины l=10 см. Сколько оборотов в минуту делает регулятор (рис. 2.2.5)?
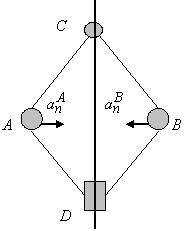
Рис. 2.2.5
Решение. Для того чтобы найти величину угловой скорости регулятора, напишем зависимость ускорения шара от параметров регулятора. Так как регулятор вращается с постоянной скоростью, то ускорение шара будет центростремительным ускорением, модуль которого определяется формулой
![]() ,
,
где r – кратчайшее расстояние шара до оси вращения.
С
другой стороны, согласно условию,
![]() .
Приравнивая эти два выражения нормального
ускорения шара, находим:
.
Приравнивая эти два выражения нормального
ускорения шара, находим:
![]() .
.
Угловая скорость регулятора будет равна
![]() .
.