

Лекция 6 Трение
1 Трение покоя (сцепления)
Исследованием явления трения впервые занимался Леонардо да Винчи. В конце XVII в. французский физик Амонтон (1663-1705) установил независимость силы трения от величины поверхности соприкасания тел. Законы трения были сформулированы французским физиком Кулоном (1736-1806).
Если
к твердому телу, покоящемуся на шероховатой
горизонтальной плоскости (рис. 6.1),
приложить горизонтальную силу
![]() ,
то действие этой
,
то действие этой
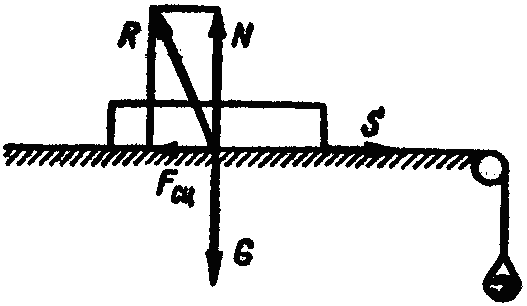
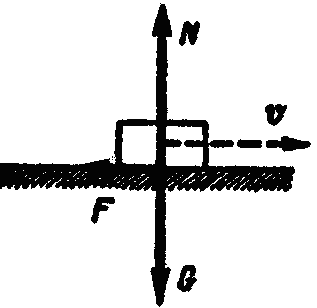
Рис. 6.1 Рис. 6.2
силы
вызовет появление силы сцепления
![]() ,
представляющей собой силу противодействия
плоскости смещению тела. Благодаря
сцеплению тело остается в покое при
изменении модуля силы
от нуля до некоторого значения
,
представляющей собой силу противодействия
плоскости смещению тела. Благодаря
сцеплению тело остается в покое при
изменении модуля силы
от нуля до некоторого значения
![]() .
Это значит,
что модуль силы сцепления тоже изменяется
от
.
Это значит,
что модуль силы сцепления тоже изменяется
от
![]() до
до
![]() в момент начала движения.
в момент начала движения.
Модуль максимальной силы сцепления, как показывает опыт, пропорционален нормальному давлению N тела на плоскость. В рассматриваемом случае N = G. Тогда
![]() .
.
Коэффициент
пропорциональности
![]() является
отвлеченным числом и называется
коэффициентом
сцепления.
является
отвлеченным числом и называется
коэффициентом
сцепления.
![]()
Коэффициент
сцепления зависит от материала и
физического состояния соприкасающихся
тел и определяется экспериментально.
Его величина для материалов, используемых
в технике, обычно меньше единицы. Так
как максимальное значение силы сцепления
равно
![]() ,
то модуль силы сцепления всегда
удовлетворяет условию
,
то модуль силы сцепления всегда
удовлетворяет условию
![]() .
.
Направление силы сцепления противоположно направлению того движения, которое возникло бы под действием приложенных к телу сил при отсутствии сцепления.
При скольжении тела по шероховатой поверхности к нему прилажена сила трения скольжения. Направление этой силы, противодействующей скольжению, противоположно направлению скорости тела (рис. 6.2).
Модуль силы трения скольжения пропорционален нормальному давлению N:
![]() .
.
Коэффициент пропорциональности f называется коэффициентом трения скольжения и определяется опытным путем.
Коэффициент трения скольжения является отвлеченной величиной и зависит от материала и физического состояния трущихся поверхностей, а также от скорости движения тела и удельного давления.
Однако в элементарных расчетах зависимость коэффициента трения скольжения от скорости и удельного давления часто не учитывается.
Экспериментально установлено, что
![]() .
.
Реакция
R
реальной (шероховатой) поверхности в
отличие от реакция идеальной (гладкой)
поверхности имеет две составляющие:
нормальную реакцию
![]() и силу сцепления
и силу сцепления
![]() (или силу трения
при движении тела).
(или силу трения
при движении тела).
Угол
φсц,
образованный реакцией шероховатой
поверхности с нормалью к поверхности
в предельном состоянии покоя при
![]() называется углом
сцепления
(рис. 6.3). Тангенс угла сцепления равен
коэффициенту сцепления:
называется углом
сцепления
(рис. 6.3). Тангенс угла сцепления равен
коэффициенту сцепления:
![]() ,
,
или
![]() .
.
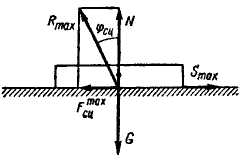
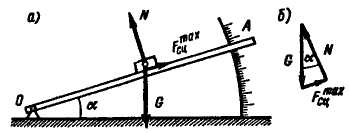
Рис. 6.3 Рис. 6.4
Угол, тангенс которого равен коэффициенту трения скольжения, называется углом трения.
Угол сцепления можно определить опытным путем. Прибор для определения угла сцепления очень прост. Он представляет собой наклонную плоскость, угол наклона которой α можно изменять (рис. 6.4, а).
Зафиксируем угол наклона α плоскости ОА, при котором помещенное на ней тело находится в предельном состоянии покоя и сила сцепления достигает максимального значения. Построим замкнутый треугольник сил, действующих на тело, и определим угол α (рисунок 6.4, б):
![]()
т.е. угол наклона плоскости α, при котором тело находится в предельном состоянии покоя, равен углу сцепления φсц.
Значение
коэффициента сцепления для соответствующих
материалов (тело - плоскость) можно
определить по таблице тангенсов углов,
так как
![]() .
.
Конус с вершиной в точке касания тел, образующая которого составляет угол сцепления с нормалью к поверхностям тел, называется конусом сцепления (рис. 6.5). Поверхность конуса сцепления представляет собой геометрическое место максимальных реакций опорной поверхности. Действительно, максимальная реакция поверхности может занимать различные положения на поверхности этого конуса, зависящие от направления силы , стремящейся сдвинуть тело (рис. 6.3). Пространство внутри конуса, представляет собой совокупность возможных положений реакций опорной поверхности в состоянии покоя. Пусть к покоящемуся телу приложены силы (в том числе вес тела), линия действия равнодействующей которых лежит внутри конуса сцепления (рис. 6.5). Эти силы не приведут тело в движение, так как сила будет уравновешена реакцией поверхности.
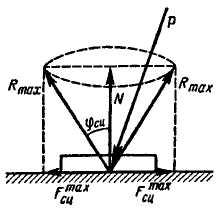
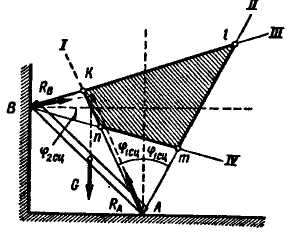
Рис. 6.5 Рис. 6.6
Рассмотрим равновесие сил, действующих на тяжелый брусок, опирающийся на две шероховатые плоскости (рис. 6.6). В точках А и В возникают реакции опор, линии действия которых не выходят за пределы конусов сцепления. Проведя линии А—I,А—II,В—III и В — IV, составляющие углы сцепления φ1сц, и φ2сц с перпендикулярами к опорным плоскостям, восставленными в точках А и В, получаем границы конусов сцепления. Четырехугольник, образованный этими линиями, внутри которого могут пересекаться линии действия реакций опор А и В, называется областью равновесия.
Брусок АВ находится под действием трех сил: его веса и двух реакций опор и . При равновесии линия действия этих трех сил пересекутся в одной точке.
Так как любая точка площадки klmn может являться точкой пересечения линий действия реакций опор и , то брусок находится в состоянии покоя, если линия действия силы веса бруска пересекает область равновесия.
В случае если линия действия силы веса проходит через точку k области равновесия, брусок находится в предельном состоянии покоя.
Брусок не может удержаться в указанном на рисунке положении, если линия действия силы веса проходит вне области равновесия. Если на брусок действует несколько задаваемых сил и они приводятся к равнодействующей силе, установленным условиям должна удовлетворять эта равнодействующая.
Задача 1. Определить модуль силы , при которой начнется движение блока (рис. 6.7, а). Вес блока Q = 2 кН, высота h = 0,8 м, ширина b = 0,6 м. Сила , приложенная в точке В, образует угол 30° с горизонтом. Коэффициент трения между блоком и горизонтальным полом f = 0,2.
Решение. Движение блока может начаться в двух случаях: а) если начнется скольжение блока по плоскости вправо (рис. 6.7, б) и б) если блок начнет опрокидываться вокруг ребра (рис. 6.7, в).
Рассмотрим первый случай. В этом случае точка приложения реакции пола неизвестна. Составим уравнения равновесия — приравняем суммы проекций всех сил на оси координат (рис. 6.7, б) нулю
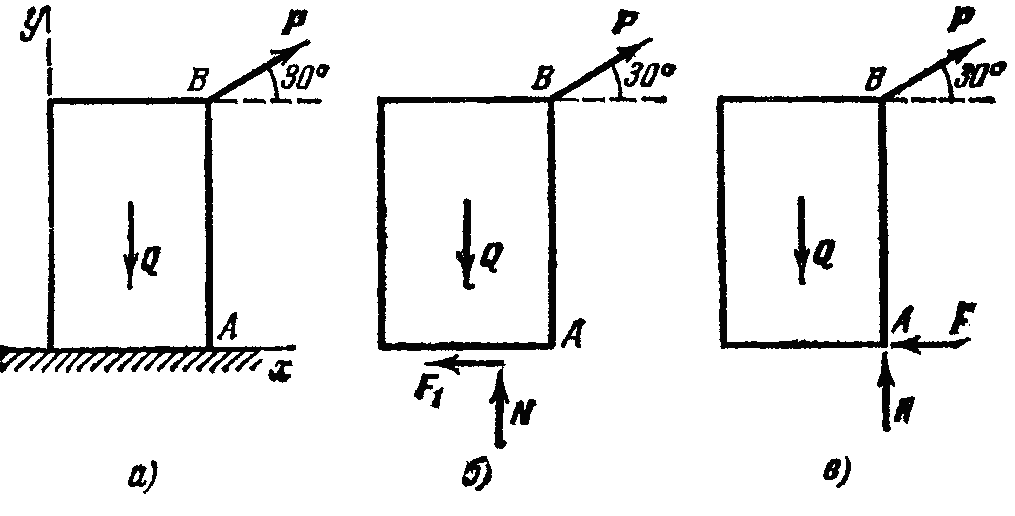
Рис. 6.7
![]() ,
,
![]() .
.
Кроме того, учтем зависимость силы трения от нормального давления
![]() .
.
Определим
из данной системы уравнений силу
.
Исключая силы
![]() и
и
![]() ,
находим
,
находим
![]() кН.
кН.
Если величина силы станет больше этого значения, то блок начнет скользить вправо.
Рассмотрим
второй случай.
В случае возможного опрокидывания
блока вокруг ребра А
нормальная реакция
![]() и сила трения
будут
приложены в точке А
(рис. 6.7, в).
и сила трения
будут
приложены в точке А
(рис. 6.7, в).
Составим три уравнения равновесия и четвертое уравнение-зависимость силы трения от нормального давления:
![]() ,
(6.1)
,
(6.1)
![]() ,
(6.2)
,
(6.2)
![]() .
(7.3)
.
(7.3)
![]() .
(6.4)
.
(6.4)
Для нахождения величины силы достаточно найти ее значение из (6.3):
![]() кН.
кН.
Если модуль силы станет больше этого значения, то блок начнет опрокидываться около ребра А.
Уравнения (6.1), (6.2), (6.4) смогут быть использованы для определения нормальной реакции и силы трения.
Сопоставляя значения модуля силы в первом и во втором случаях, заключаем, что так как величина силы при скольжении меньше ее величины при опрокидывании, то при возрастании модуля силы от нуля до максимума блок начнет сначала скользить, а не опрокидываться.