

4 Ускорение кориолисово
Кориолисовым или поворотным ускорением называется составляющая абсолютного ускорения точки в сложном движении, равная удвоенному векторному произведению угловой скорости переносного вращения на относительную скорость точки:
![]() (13.13)
(13.13)
Кориолисово ускорение характеризует:
1) изменение модуля и направления переносной скорости точки вследствие ее относительного движения;
2) изменение направления относительной скорости точки вследствие вращательного переносного движения.
Например, если человек идет равномерно вдоль радиуса равномерно вращающейся платформы, то его относительной скоростью является скорость его движения вдоль радиуса, а переносной — скорость той точки платформы, где он находится в данный момент (рис. 13.6).
Пусть в момент времени t человек занимает положение М, а в момент t + Δt - положение M1.
Так
как относительное движение равномерное
и прямолинейное, то относительное
ускорение человека
![]() .
Однако за время Δt
относительная
скорость изменяется по направлению от
до
.
Однако за время Δt
относительная
скорость изменяется по направлению от
до
![]() ,
вследствие вращения подвижной системы
(платформы).
,
вследствие вращения подвижной системы
(платформы).

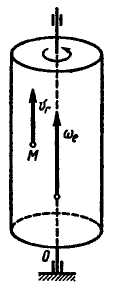
Рис. 13.6 Рис. 13.7
За
время Δt
происходит изменение модуля переносной
скорости от
![]() до
до
![]() вследствие относительного перемещения
человека из точки М
в точку M1
и
ее направления. Указанные изменения
и
вызывают появление кориолисова ускорения.
Модуль кориолисова ускорения определяется
как модуль векторного произведения
(13.13):
вследствие относительного перемещения
человека из точки М
в точку M1
и
ее направления. Указанные изменения
и
вызывают появление кориолисова ускорения.
Модуль кориолисова ускорения определяется
как модуль векторного произведения
(13.13):
![]() .
(13.14)
.
(13.14)
Кориолисово ускорение равно нулю в трех случаях:
1)
если
![]() ,
т. е. в случае поступательного переносного
движения или в моменты обращения в нуль
угловой скорости непоступательного
переносного движения;
,
т. е. в случае поступательного переносного
движения или в моменты обращения в нуль
угловой скорости непоступательного
переносного движения;
2)
если
![]() , т. е. в
случае относительного покоя точки
или
в моменты
равенства нулю относительной скорости
движущейся точки:
, т. е. в
случае относительного покоя точки
или
в моменты
равенства нулю относительной скорости
движущейся точки:
3)
если
![]() ,
т.е. в случае, когда
,
т.е. в случае, когда
![]() или
или
![]() ;
иначе,
когда
относительная скорость точки параллельна
оси переносного вращения, как, например,
при движении точки М
вдоль
образующей цилиндра, вращающегося
вокруг своей оси (рис. 13.7).
Направление
кориолисова ускорения определяется по
правилу векторного произведения.
;
иначе,
когда
относительная скорость точки параллельна
оси переносного вращения, как, например,
при движении точки М
вдоль
образующей цилиндра, вращающегося
вокруг своей оси (рис. 13.7).
Направление
кориолисова ускорения определяется по
правилу векторного произведения.
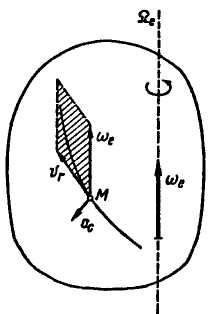
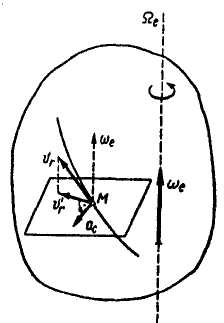
Рис. 13.8 Рис. 13.9
IIycть
точка М
движется со скоростью
относительно тела, вращающегося вокруг
оси
с угловой скоростью
(рис.
13.8). Построив
условно вектор
в точке М,
направляем кориолисово ускорение
![]() по перпендикуляру к плоскости векторов
и
в ту сторону, откуда поворот вектора
к скорости
на наименьший угол виден происходящим
в сторону, обратную вращению часовой
стрелки.
по перпендикуляру к плоскости векторов
и
в ту сторону, откуда поворот вектора
к скорости
на наименьший угол виден происходящим
в сторону, обратную вращению часовой
стрелки.
Для определения направления кориолисова ускорения удобно пользоваться правилом Жуковского: чтобы найти направление кориолисова ускорения, следует спроецировать относительную скорость точки на плоскость, перпендикулярную оси переносного вращения, и повернуть эту проекцию в той же плоскости на 90° в сторону переносного вращения (рис. 13.9).
Действительно,
полученное направление
(рис. 13.9)
перпендикулярно плоскости треугольника,
образованного скоростью
и ее проекцией
,
а эта
плоскость совпадает с плоскостью
векторов
и
(рис.
13.8). Если
![]()
![]()
![]() ,
то sin
(
,
)
= 1, тогда
,
то sin
(
,
)
= 1, тогда
![]() (13.15)
(13.15)
В этом случае три вектора , , взаимно перпендикулярны (рис. 13.10). Этот случай определения направления кориолисова ускорения возможен при относительном движении точки в плоскости, перпендикулярной оси переносного вращения.
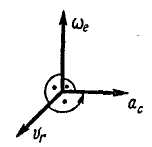

Рис. 13.10 Рис. 13.11
Для иллюстрации правила Жуковского рассмотрим несколько примеров определения модуля и направления кориолисова ускорения.
Предположим, например, что диск вращается вокруг оси, перпендикулярной его плоскости в сторону, обратную вращению часовой стрелки с угловой скоростью , а по хорде диска KL движется точка М (рис. 13.11).
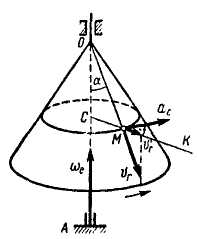

Рис. 13.12 Рис. 13.13
Определим модуль и направление кориолисова ускорения точки М в положении, указанном на рисунке, если относительная скорость точки в этот момент равна . Так как точка движется в плоскости диска, перпендикулярной его оси вращения, то sin( , )=1 и модуль кориолисова ускорения
.
Направление корнолисова ускорения получаем, повернув в плоскости диска вектор против вращения часовой стрелки на угол 90°.
Определим теперь модуль и направление кориолисова ускорения точки М, движущейся с относительной скоростью по образующей кругового конуса под углом МОА = а от его вершины к основанию (рис. 13.12). Конус вращается вокруг своей оси с угловой скоростью в направлении, указанном на рисунке.
Отложив
вектор угловой скорости
переносного вращения по оси этого
вращения, находим
![]() .
.
Определяем модуль кориолисова ускорения точки М:
![]()
Чтобы
найти направление
кориолисова ускорения, проецируем
относительную скорость точки на
плоскость, перпендикулярную оси вращения
конуса. Проекция относительной скорости
![]() направлена по прямой СК, совпадающей
с радиусом СМ. Повернув эту проекцию на
угол
90о
но направлению вращения конуса, установим,
что кориолисово ускорение
направлено по касательной к окружности
радиусом СМ в сторону вращения конуса.
направлена по прямой СК, совпадающей
с радиусом СМ. Повернув эту проекцию на
угол
90о
но направлению вращения конуса, установим,
что кориолисово ускорение
направлено по касательной к окружности
радиусом СМ в сторону вращения конуса.
Кориолисовым ускорением обладают точки (тела), движущиеся по поверхности Земли, например частицы воды в реках, поезда, автомобили и т.д.