

Равнодействующая сходящейся системы сил
Сходящимися называются силы, линии действия которых пересекаются в одной точке.
Если к телу приложены две силы, линия действия которых пересекаются в одной точке, то их равнодействующая приложена в точке А пересечения линий действия сил; она изображается диагональю параллелограмма, построенного на этих силах (рис. 2.4). Построение параллелограмма сил можно заменить построением треугольника сил AВD (рис. 2.5).
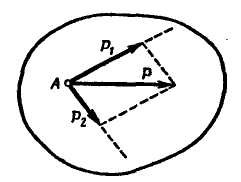
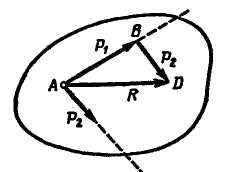
Рис. 2.4 Рис. 2.5
Направление
равнодействующей силы
![]() по контуру силового треугольника
противоположно направлению обхода
контура треугольника, определяемому
слагаемыми силами.
по контуру силового треугольника
противоположно направлению обхода
контура треугольника, определяемому
слагаемыми силами.
При
помощи параллелограмма или треугольника
сил можно решить и обратную задачу -
разложить силу
![]() на две составляющие
на две составляющие
![]() и
и
![]() ,
приложенные в той же точке и направленные
по заданным линиям действия KL
и DE
(рис. 2.6 и 2.7).
,
приложенные в той же точке и направленные
по заданным линиям действия KL
и DE
(рис. 2.6 и 2.7).
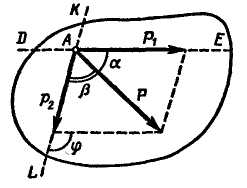

Рис. 2.6 Рис. 2.7
Используя известные формулы тригонометрии (теорему синусов), имеем:
![]() .
.
Так
как
![]() ,
то
,
то
![]() .
.
3 Условия равновесия сходящейся системы сил Векторная форма
Пусть
к твердому телу в точках
![]() приложены сходящиеся силы
приложены сходящиеся силы
![]() (рис. 2.8). Все эти силы можно перенести в
точку О
пересечения линий их действия и, строя
треугольники сил, последовательно
сложить. Тогда равнодействующая этих
сил изобразится замыкающей стороной
многоугольника сил.
(рис. 2.8). Все эти силы можно перенести в
точку О
пересечения линий их действия и, строя
треугольники сил, последовательно
сложить. Тогда равнодействующая этих
сил изобразится замыкающей стороной
многоугольника сил.
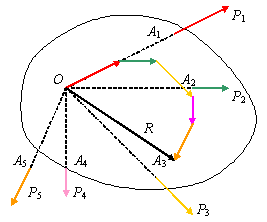
Рис. 2.8
Таким образом, равнодействующая сходящихся сил приложена в точке О пересечения линий действия сил и равна их геометрической сумме:
![]() .
(2.6)
.
(2.6)
Направление равнодействующей по контуру силового многоугольника противоположно направлению обхода этого контура, определяемому направлением первой силы.
Если к твердому телу приложены три сходящиеся силы, не лежащие в одной плоскости, то их равнодействующая приложена в точке пересечения линий действия сил и изображается диагональю параллелепипеда, построенного на этих силах (рис. 2.9).
Правило сложения трех сходящихся сил в пространстве называется правилом параллелепипеда сил.
Сходящиеся силы уравновешиваются в случае, если их равнодействующая равна нулю, т.е. многоугольник сил замкнут (рис. 2.10):
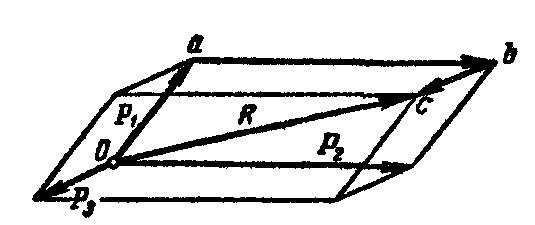
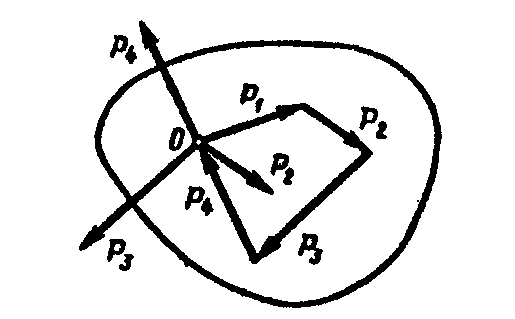
Рис. 2.9 Рис. 2.10
![]() ,
,
или
![]() .
(2.7)
.
(2.7)
В замкнутом многоугольнике сил все силы направлены по контуру многоугольника в одну сторону по обходу многоугольника.
Условие равновесия сходящихся сил, расположенных в пространстве и на плоскости, одно и то же. Однако графический метод решения задач на равновесие сходящихся сил практически применяется только для сил, расположенных в одной плоскости. Решение задач на равновесие сходящихся сил в пространстве построением замкнутого многоугольника сил весьма сложно, так как стороны этого многоугольника не лежат в одной плоскости.