

2 Приведение произвольной системы сил к заданному центру
Применяя
метод Пуансо, приведем систему трех
произвольно расположенных сил
![]() ,
приложенных к твердому телу в точках
А1,А2
и А3
к заданному
центру О.
Получим три силы
,
приложенных к твердому телу в точках
А1,А2
и А3
к заданному
центру О.
Получим три силы
![]() ,
приложенные в центре О,
и три присоединенные пары сил
,
приложенные в центре О,
и три присоединенные пары сил
![]() (рис. 4.2). Складывая силы
(рис. 4.2). Складывая силы
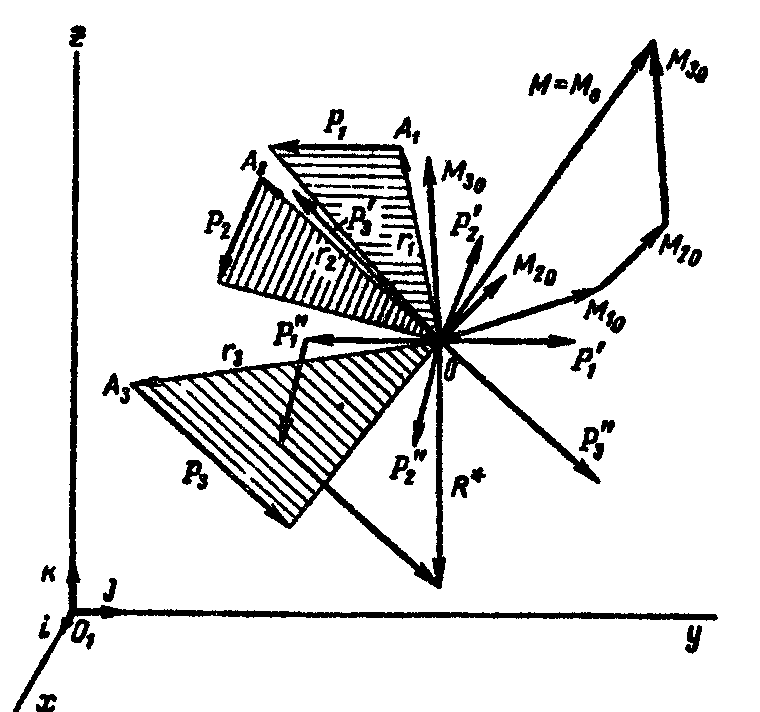
Рис. 4.2
по
правилу многоугольника, получим их
равнодействующую
![]() ,
равную геометрической сумме заданных
сил и приложенную в центре приведения
О:
,
равную геометрической сумме заданных
сил и приложенную в центре приведения
О:
![]() .
.
Геометрическая сумма всех сил системы называется главным вектором системы сил и в отличие от равнодействующей обозначается .
Складывая пары , получим эквивалентную им пару сил. Момент каждой присоединенной пары сил равен моменту соответствующей силы относительно центра приведения:
![]() .
.
Момент пары сил, эквивалентной трем присоединенным парам сил, равен геометрической сумме моментов этих пар. Строя многоугольник моментов присоединенных пар, находим
![]() ,
,
т. е. момент пары сил, эквивалентной трем присоединенным парам, равен главному моменту этих трех сил относительно центра приведения. Распространяя полученные результаты на любое число сил, произвольно расположенных в пространстве, имеем
![]() ,
,
Этот результат можно сформулировать следующим образом: силы, произвольно расположенные в пространстве, можно привести к одной силе, равной их главному вектору и приложенной в центре приведения, и к паре сил с моментом, равным главному моменту всех сил относительно центра приведения.
Выбор
центра приведения не отражается на
модуле и направлении главного вектора
![]() ,
но влияет на модуль и направление
главного момента
.
,
но влияет на модуль и направление
главного момента
.
3 Условия и уравнения равновесия произвольной системы сил Частные случаи приведения системы сил
В зависимости от модулей главного вектора и главного момента и их взаимного направления можно произвести дальнейшее упрощение системы сил.
I. Приведение к паре сил
![]() .
.
Система сил приводится к одной паре сил, равной главному моменту и не зависящей от выбора центра приведения.
II. Приведение к равнодействующей
а)
![]() .
.
Система сил приводится к равнодействующей, равной главному вектору по модулю и направлению и проходящей через центр приведения.
б)
![]() .
.
Система
сил приводится к равнодействующей,
равной по модулю и направлению главному
вектору и отстоящей от центра приведения
на расстоянии
![]() .
Линия действия равнодействующей
называется центральной осью системы.
.
Линия действия равнодействующей
называется центральной осью системы.
Приведение системы сил к динаме (динамическому винту)
Известно, что
![]() .
.
Система сил приводится к динаме (динамическому винту). Динамой называют совокупность силы и пары сил, векторный момент которой направлен параллельно вектору силы. Линию действия динамы называют центральной винтовой осью.
Главный момент раскладываем на направление главного вектора и перпендикулярно главному вектору:
![]() ,
,
![]() .
.
Так
как
![]() (рис. 4.4, а),
то эта система сил приводится к
равнодействующей, которая находится
от точки приведения на расстоянии:
(рис. 4.4, а),
то эта система сил приводится к
равнодействующей, которая находится
от точки приведения на расстоянии:
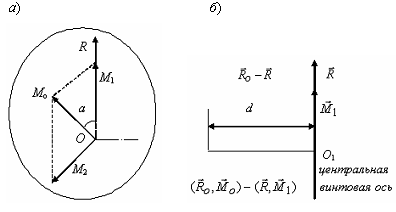
Рис. 4.4
![]() .
.
Пара
сил с векторным моментом
![]() является свободным вектором и поэтому
является свободным вектором и поэтому
![]() перенесем в точку
перенесем в точку
![]() ,
где приложена равнодействующая (рис.
4.4, б).
Получим в точке
систему, эквивалентную исходной
системе сил:
,
где приложена равнодействующая (рис.
4.4, б).
Получим в точке
систему, эквивалентную исходной
системе сил:
![]() ~
~
![]() ,
,
где
![]() - динама.
- динама.