

Замкнутые сау
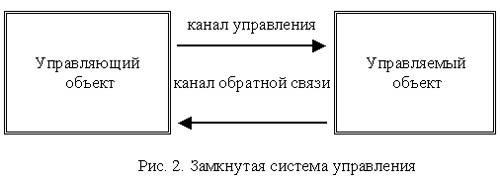
В замкнутых системах автоматического регулирования управляющее воздействие формируется в непосредственной зависимости от управляемой величины. Связь входа системы с его выходом называется обратной связью. Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной.
В замкнутых системах управления управляющий объект по прямому каналу управления производит необходимые действия над объектом управления, а по каналу обратной связи получает информацию о его реальных параметрах. Это позволяет осуществлять управление с гораздо большей точностью. Информационную модель замкнутой системы управления можно наглядно представить с помощью следующей схемы:
Разомкнутые сау
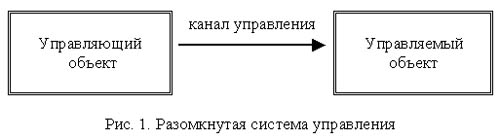
Сущность принципа разомкнутого управления заключается в жестко заданной программе управления. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в САУ модели управляемого объекта. Примеры таких систем : таймер, блок управления светофора, автоматическая система полива газона, автоматическая стиральная машина и т. п.
В свою очередь различают: разомкнутые по задающему воздействию, разомкнутые по возмущающему воздействию
7. Классификация су по виду задающего воздействия и количеству регулируемых координат на объекте.

Рис. Классификация САУ
Классификация СУ по виду задающего воздействия и количеству регулируемых координат на объекте.
По принципу регулирования
Регулирование по отклонению –в качестве параметра регулирования рассматривается величина отклонения значений функции от требуемых параметров.
Регулирование по возмущению - в качестве параметра регулирования рассматривается величина возмущения значений параметров.
Комбинированная система- учитывается несколько условий регулирования .
По количеству регулируемых величин:
Одномерные - системы с одним входом и одним выходом;
Многомерные – системы с несколькими входами и несколькими выходами.
8. Классификация су по математическому описанию и принципу действия сау во времени.
По математическому описанию различают:
а) линейные системы;
б) нелинейные системы.
К линейным системам применим принцип суперпозиции, в соответствии с которым выходной сигнал линейной системы на любое произвольное входное воздействие можно определить через ее реакцию на определенное элементарное воздействие.
Нелинейные системы описываются нелинейными дифференциальными уравнениями. Закон управления в такой системе представляет собой нелинейную функцию.
В зависимости от характера внешних воздействий (задающего и возмущающего) различают детерминированные и стохастические системы. В детерминированных САР внешние воздействия имеют вид постоянных функций времени. В стохастических системах внешние воздействия имеют вид случайных функций.
Линейные системы описываются линейными дифуравнениями вида:
an * dnx / dtn + ...a1dx / dt + aox = bmdmu / dtm + b1du / dt + bou
Если ai = const , то это стационарная система, а если зависит от t, то нестационарная. Нелинейные системы соответственно записываются нелинейными дифуравненими:
dnx / dtn = f(x,dx / dt,..dn − 1x / dtn − 1,u,du / dt...,dmu / dtm
В стохастических САУ используют процессы вероятностного характера.