

35 Установившийся статический режим. Статика су
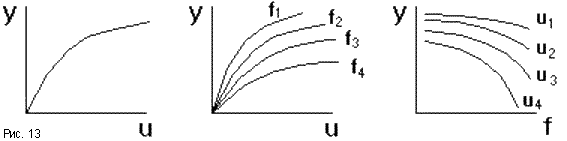
Режим работы САУ, в котором управляемая величина и все промежуточные величины не изменяются во времени, называется установившимся, или статическим режимом. Любое звено и САУ в целом в данном режиме описывается уравнениями статики вида y = F(u,f), в которых отсутствует время t. Соответствующие им графики называются статическими характеристиками. Статическая характеристика звена с одним входом u может быть представлена кривой y = F(u) (рис.13). Если звено имеет второй вход по возмущению f, то статическая характеристика задается семейством кривых y = F(u) при различных значениях f, или y = F(f) при различных u.
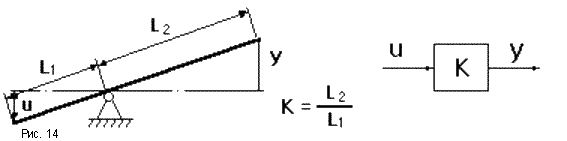
Так примером одного из функциональных звеньев системы регулирования воды в баке (см. выше) является обычный рычаг (рис.14). Уравнение статики для него имеет вид y = Ku. Его можно изобразить звеном, функцией которого является усиление (или ослабление) входного сигнала в K раз. Коэффициент K = y/u, равный отношению выходной величины к входной называется коэффициентом усиления звена. Когда входная и выходная величины имеют разную природу, его называют коэффициентом передачи.
36. Способы повышения точности су
Повышение точности работы СУ возможно с помощью изменения ее структуры или изменения параметров. Общими методами повышения точности являются:
Увеличение коэффициента усиления К разомкнутой системы
При регулировании по отклонению ошибка тем меньше, чем больше К. Метод эффективен, широко применяется, но в системах высокого порядка сказывается противоречие между требованием точности и требованием устойчивости.
Повышение порядка астатизма (регулирование по интегралу от ошибки с использованием ПИ - регулятора).
Повышение точности регулированием по интегралу от ошибки заключается в повышении порядка астатизма, что позволяет свести к нулю первые коэффициенты ошибок системы. Но в этом случае целесообразно повышать порядок астатизма без заметного или недопустимого снижения запаса устойчивости введением в СУ изодромных звеньев с передаточными функциями вида W(p)=(Tp+1)/τp, но не более 2-3.
Применение регулирования по производным от ошибки (с применением ПД - регуляторов).
При регулировании по производной от ошибки СУ начинает чувствовать не только наличие ошибки, но и тенденцию к изменению ее величины. Введение производной увеличивает запасы устойчивости, что в конечном итоге позволяет повысить коэффициент разомкнутой системы (точность СУ), т.е. целесообразно использовать ПД - регуляторы с передаточными функциями вида W(p)= К(Tp+1), но не более 2-3 для обеспечения требуемой помехозащищенности.
4. Использование комбинированного управления.
5. Введение неединичных обратных связей.
37. Структурная устойчивость су.
СУ может быть неустойчивой по двум причинам: неподходящий состав динамических звеньев и неподходящие значения параметров звеньев.
СУ, неустойчивые по первой причине называются структурно неустойчивыми. Это означает, что изменением параметров СУ нельзя добиться ее устойчивости, нужно менять ее структуру.
Структурно неустойчивую СУ можно сделать устойчивой, включив в нее корректирующие звенья (например, дифференцирующие или форсирующие) или изменив структуру СУ, например, с помощью местных обратных связей.