

Основные понятия
Автоматика — отрасль науки и техники, охватывающая теорию и практику автоматического управления, а также принципы построения автоматических систем и образующих их технических средств.
Объект управления — система, в которой происходит подлежащий управлению процесс. Взаимодействие с ОУ происходит через входы (которые являются причинами появления процессов в ОУ) и выходы (которые являются процессами - следствиями)
Управление — процесс на входе объекта управления, обеспечивающий такое протекание процесов на выходе объекта управления, которое обеспечивают достижение заданной цели управления.
Цель — желаемое поведение процессов на выходе объекта управлениия.
Объекты:
управляемые
неуправляемые
Система автоматического управления (САУ) включает в себя объект управления и устройство управления.
Устройство управления — совокупность устройств, с помощью которых осуществляется управление входами объекта управления.
Регулирование — частный случай управления, цель которого заключается в поддержании на заданном уровне одного или нескольких выходов объекта управления.
Регулятор — преобразует ошибку регулирования ε(t) в управляющее воздействие, поступающее на объект управления.
Задающее воздействие g(t) — определяет требуемый закон регулирования выходной величины.
Ошибка регулирования ε(t) = g(t) — y(t), разность между требуемым значением регулируемой величины и текущим её значением. Если ε(t) отлична от нуля, то этот сигнал поступает на вход регулятора, который формирует такое регулирующее воздействие, чтобы в итоге с течением времени ε(t) = 0.
Возмущающее воздействие f(t) — процесс на входе объекта управления, являющийся помехой управлению.
Системы автоматического управления:
разомкнутые
замкнутые
Функциональные схемы
Типовая схема САУ
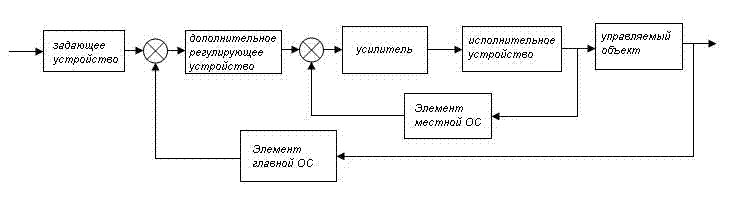
Функциональная схема элемента — схема системы автоматического регулирования и управления, составленная по функции, которую выполняет данный элемент.
Выходные сигналы — параметры, характеризующие состояние объекта управления и существенные для процесса управления.
Выходы системы — точки системы, в которых выходные сигналы могут наблюдаться в виде определенных физических величин.
Входы системы — точки системы, в которых приложены внешние воздействия.
Входные сигналы:
помехи — сигналы, не связанные с источниками информации о задачах и результатах управления.
полезные — сигналы, связанные с источниками информации о задачах и результатах управления.
Системы:
одномерные — системы с одним входом и одним выходом.
многомерные — системы с несколькими входами и выходами.
Понятие качества управления.
Качество процесса управления определяется поведением автоматической системы при переходе с одного режима работы на другой. Различают следующие основные показатели качества процесса управления:
колебательность переходного процесса,
максимальное отклонение (перерегулирование) управляемой переменной от заданного значения,
точность,
время переходного процесса.
Изменение выходной координаты в переходном режиме называют переходным процессом.
После окончания переходных процессов в системе устанавливается режим, когда с той или иной степенью точности выходная координата следует за задающим воздействием. На характер изменения выходной координаты в установившемся режиме существенное влияние оказывает форма воздействий. Иными словами, качество одной и той же системы зависит от характера приложенных к ней воздействий. Качество системы в установившемся режиме зависит также от ее структуры и параметров, поэтому, чтобы характеризовать свойства системы, в общее понятие качества надо включить и оценку качества установившегося режима.
Методы оценки качества процесса управления могут быть самыми различными, но определяются они в основном тремя факторами.
Во-первых, они зависят от выбора критерия качества (когда систему считать «хорошей», а когда «плохой»);
во-вторых, от исследуемого режима работы системы (в переходном режиме ошибки управления намного больше, чем в установившемся, а значит, и методы исследования должны быть разные);
в-третьих, от характеристик воздействий.