

Кинематика Лекция 4. Кинематика точки
4.1. Некоторые определения
Кинематика – это раздел теоретической механики, в котором изучают движение тел без учета их масс и действующих на них сил. Движение всегда рассматривают по отношению к некоторой определенной системе отсчета.
В кинематике имеют место две основные задачи:
1) установление закона движения, т.е. математического способа задания положения точки или тела относительно выбранной системы отсчета в любой момент времени;
2) определение по заданному закону движения кинематических характеристик этого движения, к которым относятся траектория, скорость и ускорение точки, угловая скорость и угловое ускорение тела.
Наиболее простым объектом, изучаемым в кинематике, является точка. Траекторией точки называют геометрическое место положений движущейся точки в рассматриваемой системе отсчета. Если траектория точки является прямой линией, то движение называют прямолинейным, в противном случае – криволинейным.
4.2. Способы задания движения точки
4.2.1. Векторный
способ.
Выберем некоторую точку O,
неподвижную в рассматриваемой системе
отсчета (рис. 4.1). Тогда положение
движущейся точки M в
любой момент можно определить ее
радиус-векто-ром ![]() .
Зависимость радиус-вектора
от
времени
.
Зависимость радиус-вектора
от
времени
![]() (4.1)
(4.1)
называют уравнением движения точки в векторной форме.
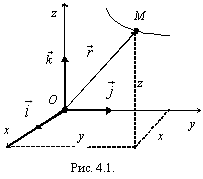
4.2.2. Координатный способ. Положение точки относительно некоторой координатной системы определяют ее координатами. Рассмотрим прямоугольную декартову систему координат Oxyz (см. рис. 4.1) и зададим координаты x, y, z как функции времени:
![]() .
(4.2)
.
(4.2)
Уравнения (4.2) называют уравнениями движения точки в координатной форме. В этом случае радиус-вектор точки M
![]() ,
(4.3)
,
(4.3)
где ![]() –
орты координатных осей.
–
орты координатных осей.
4.2.3. Естественный способ. Пусть известна траектория точки (рис. 4.2). Выберем на ней начало отсчета O криволинейной координаты S и положительное направление отсчета, тогда положение точки M в любой момент времени можно определить, воспользовавшись зависимостью
S = S(t), (4.4)
к оторую
называют уравнением
движения точки в естественной форме.
оторую
называют уравнением
движения точки в естественной форме.
Введем
подвижную систему координат, начало
которой совпадает с движущейся точкой М,
и будем использовать ее в дальнейшем.
Оси этой системы координат, называют
естественным трехгранником или
скоростными осями. Они направлены так:
ось M –
по касательной к траектории в сторону
увеличения координаты S,
ось Mn –
по главной нормали к траектории в сторону
ее вогнутости, а ось Mb дополняет
систему до правой; ![]() –
орты координатных осей.
–
орты координатных осей.
4.3. Определение скорости точки
Скорость точки характеризует изменение ее положения в рассматриваемой системе отсчета с течением времени.
4.3.1. Векторный
способ.
Пусть за время t точка
переместилась из положения M в
положение ![]() и
ее радиус-вектор изменился на
величину
и
ее радиус-вектор изменился на
величину ![]() (рис.
4.3). Тогда средней скоростью точки за
интервал времени t будет
отношение
(рис.
4.3). Тогда средней скоростью точки за
интервал времени t будет
отношение
![]() .
.
э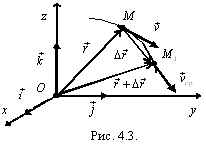 тот
вектор направлен по хорде
тот
вектор направлен по хорде ![]() и
зависит от величины интервала времени t.
и
зависит от величины интервала времени t.
Предел средней скорости
![]() (4.5)
(4.5)
называют скоростью точки в данный момент времени или просто скоростью точки. В уравнении (4.5) переменная с точкой над ней обозначает производную по времени.
Итак,
скорость точки – это кинематическая
мера ее движения, равная производной
по времени от радиус-вектора точки в
рассматриваемой системе отсчета. При
стремлении t к
нулю точка
приближается
к точке M,
и хорда
в
пределе занимает положение касательной
к траектории. Таким образом, вектор
скорости ![]() направлен
по касательной к траектории в сторону
движения точки.
направлен
по касательной к траектории в сторону
движения точки.
Единица измерения скорости в системе СИ – 1 м/с.
4.3.2. Координатный
способ.
Пусть движение точки задано координатным
способом (4.2), тогда ее радиус-вектор ![]() .
Учитывая, что орты
постоянны,
из уравнения (4.5) получим
.
Учитывая, что орты
постоянны,
из уравнения (4.5) получим
![]() .
.
Таким образом, запишем проекции вектора скорости на координатные оси:
![]() .
(4.6)
.
(4.6)
По этим проекциям можно определить модуль вектора скорости
![]() (4.7)
(4.7)
и его направляющие косинусы, т.е. косинусы углов между вектором скорости и положительными направлениями координатных осей:
![]() .
(4.8)
.
(4.8)
4.3.3. Естественный способ. Пусть точка движется по известной траектории, и ее положение определяется криволинейной координатой S (рис. 4.4). Предположим, что за время t радиус-вектор точки получил приращение , а координата S – приращение S. Определим скорость точки
![]() .
(4.9)
.
(4.9)
 Рассмотрим
вектор
Рассмотрим
вектор ![]() .
Его модуль равен пределу отношения
длины хорды
к
длине стягиваемой ею дуги:
.
Его модуль равен пределу отношения
длины хорды
к
длине стягиваемой ею дуги:
![]() .
.
Направление
вектора ![]() совпадает
с направлением
при
движении точки в сторону увеличения
координаты S (S 0)
и противоположно
при
движении в противоположную сторону
(S 0).
Таким образом, вектор
совпадает
с направлением
при
движении точки в сторону увеличения
координаты S (S 0)
и противоположно
при
движении в противоположную сторону
(S 0).
Таким образом, вектор ![]() всегда
направлен по касательной к траектории
в сторону увеличения координаты S,
т.е. он является единичным вектором
касательной к траектории точки
всегда
направлен по касательной к траектории
в сторону увеличения координаты S,
т.е. он является единичным вектором
касательной к траектории точки
![]() .
(4.10)
.
(4.10)
На основании этого из уравнения (4.9) получим
![]() .
(4.11)
.
(4.11)
Скалярную
величину ![]() называют алгебраической
скоростью точки. Она
представляет собой проекцию вектора
скорости на касательную к траектории.
Знак алгебраической скорости определяет
направление движения точки: при
называют алгебраической
скоростью точки. Она
представляет собой проекцию вектора
скорости на касательную к траектории.
Знак алгебраической скорости определяет
направление движения точки: при ![]() 0
она движется в сторону увеличения
координаты S,
при
0
– в противоположную сторону. Модуль
вектора скорости
0
она движется в сторону увеличения
координаты S,
при
0
– в противоположную сторону. Модуль
вектора скорости ![]() .
.