

Лекция 6. Сложное движение точки
6.1. Основные определения
В 5-й лекции при рассмотрении простейших движений твердого тела было показано, как определяют скорости и ускорения точек, неизменно связанных с телом. Однако во многих задачах механики точки движутся по отношению к телам, которые сами являются подвижными. Для изучения движения таких точек удобно использовать две системы отсчета: подвижную, связанную с движущимся телом, и неподвижную.
Движение
точки, одновременно рассматриваемое в
неподвижной (основной) и подвижной
(вспомогательной) системах отсчета,
называют сложным. Движение
точки относительно подвижной системы
отсчета называют относительным.
Скорость и ускорение точки в относительном
движении называют относительной
скоростью ![]() иотносительным
ускорением
иотносительным
ускорением ![]() .
.
Движение
подвижной системы отсчета по отношению
к неподвижной называют переносным. Скорость
и ускорение той неизменно связанной с
подвижной системой отсчета точки
пространства, с которой в данный момент
времени совпадает движущаяся точка,
называют переносной
скоростью ![]() и переносным
ускорением
и переносным
ускорением ![]() .
.
Движение
точки относительно неподвижной системы
отсчета называют абсолютным. Скорость
и ускорение точки в абсолютном движении
называют абсолютной
скоростью ![]() и абсолютным
ускорением
и абсолютным
ускорением ![]() .
.
Рассмотрим в качестве примера движение человека (принимаем его за точку) по палубе поступательно движущегося теплохода. Свяжем подвижную систему отсчета с теплоходом, а неподвижную – с берегом. Тогда абсолютной будет скорость человека относительно берега, относительной – скорость человека относительно теплохода, а переносной – скорость теплохода относительно берега.
Установим зависимости между абсолютными, относительными и переносными скоростями и ускорениями точки, рассматривая случаи переносного вращательного и переносного поступательного движений.
6.2. Определение абсолютной скорости точки
Рассмотрим
подвижную систему координат Oxyz,
которая вращается вокруг оси OP,
неподвижной в координатной системе ![]() ,
с угловой скоростью
,
с угловой скоростью ![]() и
угловым ускорением
и
угловым ускорением ![]() (рис.
6.1). Пусть относительное движение точки
задано в координатной форме:
(рис.
6.1). Пусть относительное движение точки
задано в координатной форме:
![]() .
(6.1)
.
(6.1)
Т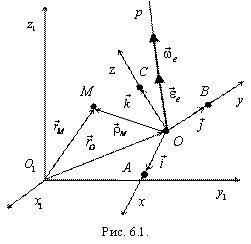 огда
радиус-вектор точки М относительно
начала
неподвижной
системы координат можно найти по формуле
огда
радиус-вектор точки М относительно
начала
неподвижной
системы координат можно найти по формуле
![]()
![]() (6.2)
(6.2)
где – орты осей подвижной системы координат, которые являются радиусами-векторами точек А, В, С, лежащих на осях этой системы на единичных расстояниях от начала координат О.
Так как подвижная система координат вращается с угловой скоростью , скорости точек А, В, С, равные производным по времени от ортов , могут быть определены по формуле Эйлера (5.21)
![]() .
(6.3)
.
(6.3)
Продифференцируем по времени равенство (6.2)
![]() .
(6.4)
.
(6.4)
В
этой формуле ![]() –
абсолютная скорость точки М,
–
абсолютная скорость точки М, ![]() ,
так как
,
так как
точка О неподвижна
относительно системы ![]()
![]() –
проекции скорости точки М относительно
подвижной системы координат на оси этой
системы, поэтому
–
проекции скорости точки М относительно
подвижной системы координат на оси этой
системы, поэтому ![]() –
относительная скорость точки М.
Для преобразования трех последних
слагаемых формулы (6.4) используем
соотношения (6.3)
–
относительная скорость точки М.
Для преобразования трех последних
слагаемых формулы (6.4) используем
соотношения (6.3)
и получим переносную скорость точки М.
Таким образом, из формулы (6.4) имеем
![]() .
(6.5)
.
(6.5)
Если
подвижная система Oxyz движется
поступательно, то скорости всех ее точек
одинаковы и равны скорости точки О.
Поэтому переносная скорость ![]() ,
направления единичных векторов
не
изменяются и их производные по времени
равны нулю. В этом случае из формулы
(6.4) получим
,
направления единичных векторов
не
изменяются и их производные по времени
равны нулю. В этом случае из формулы
(6.4) получим
![]()
или
![]() ,
,
что совпадает с формулой (6.5), записанной для случая переносного вращательного движения.
Таким образом, справедлива следующая теорема: «При сложном движении точки ее абсолютная скорость равна геометрической сумме переносной и относительной скоростей».