

3.10. Контрольные вопросы
-
Что такое М-файл?
-
Как и для чего устанавливаются пути доступа к файлам?
-
Назначение файл-функции.
-
Команды для создания файл-функции с одним или несколькими входными переменными.
-
Алгоритм создания файл-функции с несколькими выходными аргументами.
-
Как задается полином в MatLab?
-
Команда поиска локальных минимумов.
-
Алгоритм вычисления определенного интеграла.
-
Что такое интерполирование?
-
Алгоритм интерполирования в MatLab.
-
Алгоритм решения дифференциальных уравнений.
Лабораторная работа № 4
Исследование характеристик типовых
динамических звеньев с помощью
ППП Control System Toolbox системы MatLab 6.x
Содержание
4.1. Общие указания к выполнению лабораторной работы.
4.2. Цель работы.
4.3. Краткие сведения из теории.
4.4. Задание к лабораторной работе.
4.5. Методика выполнения работы.
4.6. Методический пример.
4.7. Содержание отчета.
4.8. Контрольные вопросы.
4.9. Литература.
4.1. Общие указания к выполнению лабораторной работы
Лабораторная работа выполняется на персональном компьютере в операционной среде Windows с установленной системой MatLab 6.х и пакетом прикладных программ Control System Toolbox 5.
4.2. Цель работы
Изучение моделей и характеристик основных типовых динамических звеньев систем управления с использованием пакета прикладных программ Control System Toolbox системы инженерных расчетов MatLab 6.
3. Краткие сведения из теории
Функциональные элементы, используемые в автоматических системах, могут иметь самые различные принципы действия и конструктивное исполнение. Однако общность математических выражений, связывающих входные и выходные величины различных функциональных элементов, позволяет выделить ограниченное число так называемых типовых алгоритмических звеньев. Каждому типовому алгоритмическому звену соответствует определенное математическое соотношение между входной и выходной величиной. Если это соотношение является элементарным, то и звено называется элементарным.
Алгоритмические звенья, которые описываются обыкновенными дифференциальными уравнениями первого и второго порядка, получили название типовых динамических звеньев.
Типовые динамические звенья являются основными составными частями алгоритмических структур систем управления, поэтому знание их характеристик существенно облегчает анализ таких систем.
Классификацию типовых звеньев удобно осуществлять, рассматривая различные частные формы дифференциального уравнения:
![]() (4.1)
(4.1)
Значения коэффициентов уравнения (4.1) и названия для наиболее часто встречающихся звеньев приведены в табл. 4.1.
Таблица 4.1
Типовые звенья и значение коэффициентов уравнения (4.1)
|
№ |
Название звена |
b0 |
b1 |
a0 |
a1 |
a2 |
Примечание |
|
1 |
Безынерционное (пропорциональное) |
0 |
k |
0 |
0 |
1 |
|
|
2 |
Инерционное 1-го порядка (апериодическое) |
0 |
k |
0 |
Т |
1 |
|
|
3 |
Инерционное 2-го порядка (апериодическое) |
0 |
k |
|
|
1 |
|
|
4 |
Инерционное 3-го порядка (колебательное) |
0 |
k |
|
|
1 |
|
|
5 |
Идеальное интегрирующее |
0 |
k |
0 |
0 |
1 |
|
|
6 |
Реальное интегрирующее |
0 |
k |
Т |
1 |
0 |
|
|
7 |
Идеальное дифференцирующее |
k |
0 |
0 |
0 |
1 |
|
|
8 |
Реальное дифференцирующее |
k |
0 |
0 |
T |
1 |
|
Существует ряд общих закономерностей. Звенья, у которых коэффициенты а1 ≠ 0 и b1 ≠ 0, обладают статизмом, т.е. однозначной связью между входной и выходной переменными в статическом режиме. Поэтому к их названиям часто добавляют выражение статическое или позиционное. К ним относятся звенья №2,3, 4,5,6.
Звенья, у которых а2 ≠ 0, а1 ≠ 0 и а0 ≠ 0, обладают инерционностью (замедлением). К ним относятся звенья № 2, 3, 4, 6, 8.
У звеньев № 1, 5, 7 только два коэффициента не равны нулю. Они являются простейшими, или элементарными. Все остальные звенья могут быть получены из элементарных путем определенного их соединения.
Характеристики типовых динамических звеньев приведены на рис. 4.1–4.6.
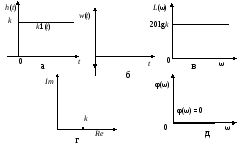
Рис. 4.1. Характеристики безынерционного звена

Рис. 4.2. Характеристики инерционного звена первого порядка
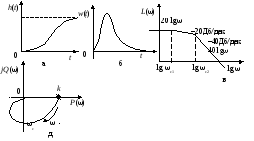
Рис. 4.3. Характеристики апериодического звена второго порядка
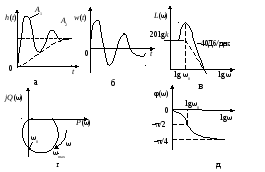
Рис. 4.4. Характеристики колебательного звена второго порядка
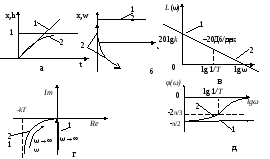
Рис. 4.5. Характеристики идеального (1) и реального (2)