

Время ускорения и замедления привода.
Динамический момент вызывает изменение скорости вращения электропривода согласно закону:
 ;
при разбеге
;
при разбеге![]() ;
при торможении
;
при торможении![]()
Ч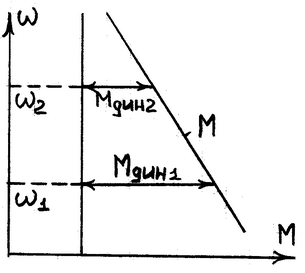 аще
всего двигатель имеет линейную зависимость
момента от скоростиM(w).
аще
всего двигатель имеет линейную зависимость
момента от скоростиM(w).
Mc=const.
![]() .
.
Установившиеся режимы работы электроприводов. Понятие о механических характеристиках.
Механической характеристикой привода называет зависимость:
Д ля
двигателя:w=f(M)
ля
двигателя:w=f(M)
Для механизма: w=fc(Mc)используют для графического исследования.
М=(w); Мс=с(w)– для математического анализа двигателя.
Для двигателя момент является независимой переменной и функция w(M)раскрывает нагрузочные свойства двигателя, т.е. показывает, как изменяется его скорость с изменением момента нагрузки. Для механизма с реактивным моментом сопротивления аргументом является скорость, т.к. момент возникает как реакция на движение и функцияМс(w) раскрывает свойства механизма, т.е. показывает какой возникает момент в механизме, если его приводить в движение с той или иной скоростью.
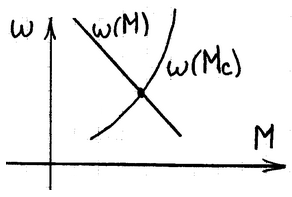
Точка пересечения – устойчивое движение привода
Мс = М– устойчива
Режимы работы электропривода.
Для анализа установившего режима используются механические характеристики, которые изображаются в прямоугольной системе координат w(М). Каждый квадрант соответствует определенному режиму работы двигателя.
|
Мw0; М0;w0 Тормозной режим II |
Мw0; М0;w0 Двигательный режим I |
|
III Мw 0; w 0; М 0 Двигательный режим |
IV М0;w0; Мw0 Тормозной режим |
В IиIIIквадрате электромагнитная мощность Мw0. Двигатель работает источником механической энергии.
В IIиIVквадрате Мw0. Двигатель работает в генераторном режиме (тормозной режим).
В целом генераторный режим классифицируется следующим образом:
Генератор с рекуперацией (отдачей) энергии в сеть или режим рекуперации торможения. Вся энергия минус потери идет в сеть, т.е. Рм = Рэ + Р.
Режим динамического торможения. Энергия не поступает в сеть, вся расходуется на потери в обмотках двигателя (в цепях обмотки двигателя). Рм = Р.
Режим торможения против включения. Машина получает энергию с вала и из сети и все расходуется на потери Рм + Рэ = Р
Существуют также два граничных режима.
Режим короткого замыкания w = 0, электромагнитная энергия поступающая из сети расходуется полностью на потериРэ = Рв обмотках двигателя.
Режим идеального холостого хода, М = 0. Потери могут покрываться за счет механической энергии ин валу двигателя.
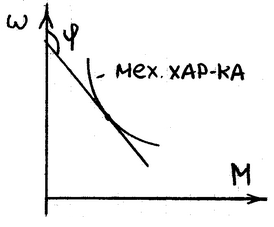
Понятие о жесткости механических характеристик.
Для
оценки формы механических характеристик
двигателя и рабочих машин, вводим понятие
о ее жесткости, под которой понимают
производную момента по скорости![]()
Графически - жесткость есть тангенс угла между осью скорости и касательной данной механической характеристики.
![]()
М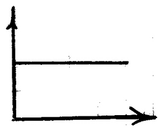 еханические
характеристики различают по жесткости:
еханические
характеристики различают по жесткости:
для синхронного двигателя =;
д
 ля
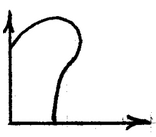
асинхронного двигателя=Ua=0;
ля
асинхронного двигателя=Ua=0;
д
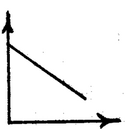 ля
двигателя постоянного тока с
ля
двигателя постоянного тока с
независимым возбуждением =cons0
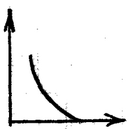
для двигателя постоянного тока с
последовательным возбуждением =Uar; 0.