

Уравнение движения электропривода и его анализ. Понятие о положении направления отсчета величин.
При проектировании и исследовании электропривода возникает задача в округлении различных механических величин (скорости, ускорения, пути, угла поворота, моментов усилий), чтобы сделать математическое описание электропривода определенным, принимают одно из 2-х возможных направлений вращения привода за положительное направление, а второе за отрицательное. Принятое за положительное направление отсчета - сохраняется единым для всех величин характеристик движения привода (скорости, момента, ускорения, угла поворота). Это понимается т.о., что если направление момента и скорости в рассмотренном интервале времени совпадают, т.е. скорость и момент имеют одинаковые знаки, то работа совершается двигателем, который создает данный момент. В случае, когда знаки момента и скорости разные, то двигатели, создающие данный момент потребляют энергию.
Понятие о реактивном и активном моментах сопротивления.
Движение электроприводов определяется действием 2-х моментов - момента развиваемого движением и момента сопротивления. Различают два типа момента сопротивления - реактивный и активный. Реактивный момент сопротивления появляется только вследствие движения привода. Это противоречит реакции механического звена на движение.
К реактивным моментам относят: момент трения, момент на рабочем органе, на металлорежущих станках, вентиляторах и т.д.
Реактивный момент сопротивления всегда направлен против движения, т.е. имеет противоположный знак направления скорости. При изменении направления вращения меняется и знак реактивного момента. Элемент, создающий реактивный момент всегда является потребителем энергии.
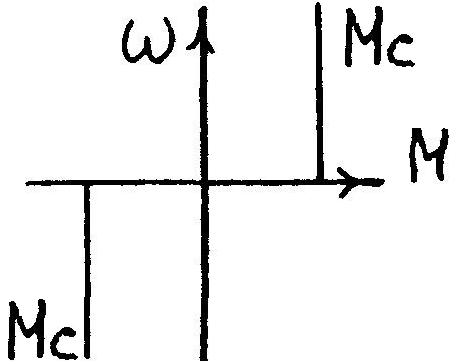 реактивная
хар-ка;
реактивная
хар-ка;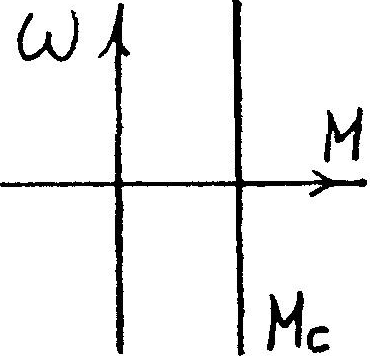 активная
механическая хар-ка.
активная
механическая хар-ка.
Активный момент сопротивления появляется независимо от движения электропривода и создается посторонним источником механической энергии.
Например: момент отвеса падающего груза. Момент создается потоком воды и т.д.
Направление активного момента не зависит от направления движения привода, т.е. при изменении направления вращения привода знак активного момента привода не меняется. Элемент, создающий активный момент, может быть как источником, так и потребителем механической энергии.
Уравнение движения и его анализ.
Для анализа движения ротора или движения якоря используют основной закон динамики, который говорит о том, что для вращения тела векторная сумма моментов, действующая относительно оси вращения, равна производной момента количества движения.
![]()
В электроприводе составляющими результативного момента является момент двигателя и момент сопротивления. Оба момента могут быть направлены как в сторону движения ротора двигателя, так и против него. Чаще всего в электроприводе используют двигательный режим работы. Электрические машины при этом моменте сопротивления имеют тормозной характер по отношению к ротору и направлены на встречу момента двигателя. Поэтому за положительное направление момента сопротивления принимают направление противоположное направлению положительного момента двигателя. В результате уравнение движения записывается так:
![]()
В этом выражении оба момента являются алгебраическими величинами, поскольку они действуют относительно одной и той же оси.
М-Мс– динамический момент.
Направление динамического момента всегда совпадает с направлением ускорения dw/dt. Последнее выражение справедливо для постоянного радиуса инерции вращения массы.
В зависимости от знака динамического момента различают следующие работы привода:
Мдин0,dw/dt0,w0 – разбег или торможение приw0.
Мдин0,dw/dt0,w0– торможение, приw0- разбег.
Мдин=0,dw/dt=0– установившийся режимw=const.
Или частный случай w=0– покой.