

Сравнительная оценка методов торможения.
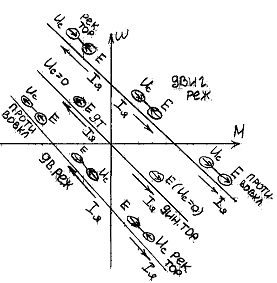
При неизменном торможении сети, при неизменном токе возбуждения сети электромеханические и механические характеристики в режиме торможения являются продолжением характеристик двигательного режима.
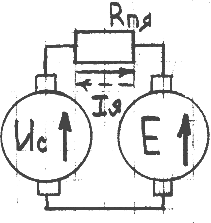
При динамическом торможении характеристики более жесткие, чем при противовключении. Для сравнительного анализа видов торможения с точки зрения потерь в двигателе обратимся к следующей схеме замещения, которая одинакова для всех видов торможения в том числе и для двигательного режима:
- - - - генераторный режим;
- - - генераторный режим;
двигательный режим.
UcIя=EIя+Iя2Rя;Рс = Рэм + Р; Рэм=ЕIя=КфwIя=Мw;РмРэм.
 ;
;![]()
Генераторное торможение при отдаче энергии в сеть (рекуперативное торможение).
Существует такой баланс энергии Рс = Рэм - Р
![]() при
торможении противовключением.
при
торможении противовключением.
Рс + Рэм = Р , т.е. вся мощность потребляемая сетью и генератором в момент торможения теряется в виде потерь в машине.
При динамическом торможении вся энергия, генерируемая машиной в процессе торможения тратиться на тепловые потери. Потери мощности при динамическом торможении меньше, чем в режиме торможения противовключением.
Динамическое торможение менее эффективно, чем торможение противовключением при малых скоростях. Механические и электромеханические характеристики в режиме динамического торможения более жесткие, чем механические характеристики в режиме торможения противовключением.
Более экономичным торможением является рекуперативное торможение, т.е. генераторное торможение с отдачей энергии в сеть.
Механические и электромеханические характеристики двигателей постоянного тока последовательного возбуждения (дпт пв).
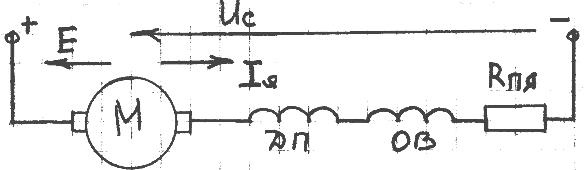
Схема включения:
Обмотки возбуждения ДПТ ПВ включены последовательно с якорем. Поток возбуждения двигателя будет определятся нагрузкой на валу двигателя. Уравнение равновесия напряжения данного двигателя имеет вид Uc=E+Iя(Rz+Rпя+Rов);Е=КФ(Iя)w.
![]() ;
;
 .
.
Т.е. вид уравнения данного двигателя аналогичен виду ДПТ НВ, но в эти двигатели дополнительно входит сопротивление обмотки возбуждения и, в отличие от двигателя независимого возбуждения, нельзя аналитически в общем виде получить электромеханические скоростные характеристики двигателя, так как поток и ток возбуждения связаны нелинейной зависимостью, которую трудно представить в виде формулы. Для построения электромеханических и механических характеристик необходимо знать зависимости Ф(Iя)иМ(Iя), которые были бы универсальными для всей серии двигателей. Эти зависимости существуют, так как внутри одной серии зазоры и степень насыщения машин мало отличаются друг от друга для всех машин.
Приблизительно вид таких зависимостей следующий:
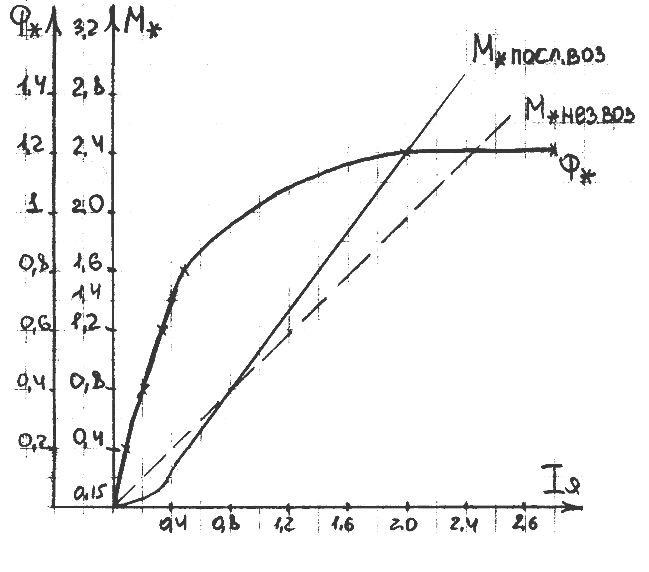
Iзона -Iя0,3; М0,15;
IIзона -Iя=0,31,3; М=0,151,4;
IIIзона -Iя1,3; М1,4.
Следует обратить внимание, что при токе Iя1момент, развиваемый двигателем с последовательным возбуждением, возрастает в большей степени, чем токМIяи эта ситуация является одним из достоинств двигателей с последовательным возбуждением. При одной и той же перегрузке по току двигатели последовательного возбуждения развивают больший момент. Это связанно с тем, что с увеличением тока растет поток двигателя. Так для двигателя независимого возбуждения:
Iядоп=22,5 - М=2,02,5 – НВ
Iядоп=22,5 - М=2,43,0 – ПВ
Зная зависимости Ф(Iя)иМ(Iя), можно построить одну зависимостьФ(М)
![]()

Для полного представления о характеристиках двигателя с последовательным возбуждением пользуются кусочно-линейной аппроксимацией кривой намагничивания Ф(Iя).
1,2 зона: Ф=1Iя;
М=КФIя;![]() ;
;![]() ;
;
![]() ;
;

 .
.
3 зона: Ф=Ф0+2Iя
Из выражения скоростных характеристик видно, что они представляют из себя кривые гиперболического вида одной из асимптот, которой является ось ординат, а второй -асимптотой говорить не имеет смысла, так как она соответствует Iя, М,т.е. она лежит вне аппроксимации.
Из
выражения электромеханических
характеристик видно, что при идеальном
холостом ходе, когда ток якоря и момент
стремятся к нулю, скорость двигателя
w.
В действительности при токе якоря равном
нулю, есть остаточное магнитное полеФост=0,020,09и наличие остаточного поля беспечивает
величину скорости идеального холостого
хода![]() .
Скорость при этом превышает номинальную
скорость в 10 раз, что недопустимо из
условия прочности коллектора и бандаже
крепящих обмоток якоря.
.
Скорость при этом превышает номинальную
скорость в 10 раз, что недопустимо из
условия прочности коллектора и бандаже
крепящих обмоток якоря.
Следует заметить, что допустимым значением идеального холостого хода для выпускаемых двигателей является w0доп4.
Данные двигатели последовательного возбуждения нельзя применять для механизмов, у которых возможен режим холостого хода с малыми потерями. Эти двигатели запрещается применять для механизмов с использованием цепных, ременных и клиноременных передач.
Наибольшая крутизна электромеханических характеристик в начальной части. Участок линейной аппроксимации в третей зоне обеспечивает более пологую механическую характеристику. На участках большей нагрузки Iя2, крутизна электромеханических характеристик практически не зависит от нагрузки. При полюсном насыщении магнитной цепи двигателя уравнение двигателя последовательного возбуждения становится аналогичным что и для двигателей с независимым возбуждением. В этом случае электромеханические характеристики будут представлять из себя прямые линии.