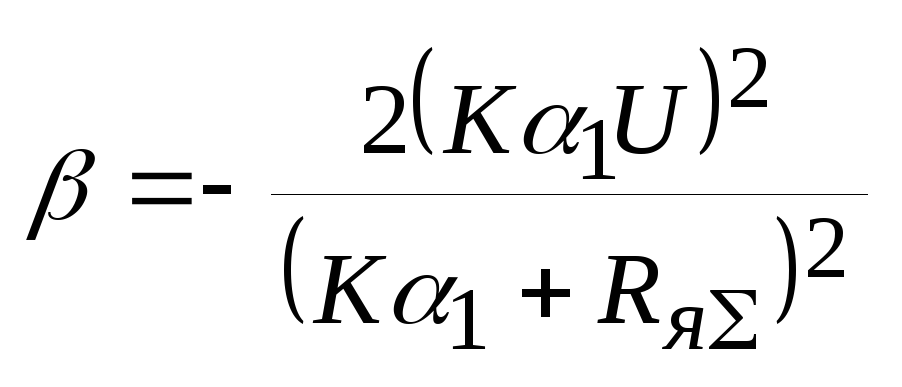
Жесткость механических характеристик
Для всех зон зависимости
от Iяжесткость
определяется![]() ,
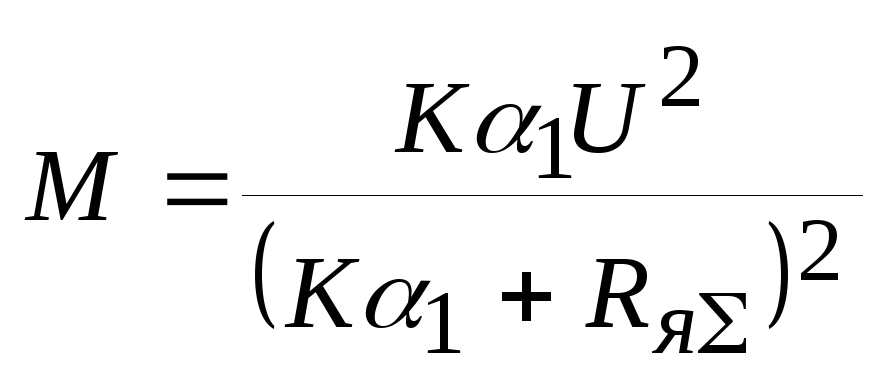
чтобы получить выражение механической
характеристики нужно решить уравнение
жесткости механической характеристики
относительно момента
,
чтобы получить выражение механической
характеристики нужно решить уравнение
жесткости механической характеристики
относительно момента
![]() ;
; ;
; - 1,2 зона.
- 1,2 зона.
Для
третьей зоны жесткость выше. Как видно
из выражения жесткости, величина
жесткости является переменной. В первой
зоне жесткость меняется меньше и ее
модуль больше и, когда магнитная цепь
машины входит в насыщение, жесткость
характеристик становится постоянной
и равной
![]()
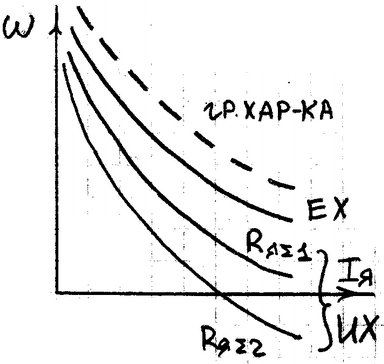
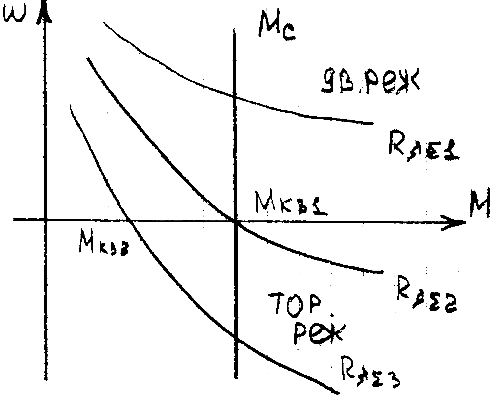
Т.о. механические характеристики двигателя последовательного возбуждения представляют собой кривую с нелинейной крутизной, которая уменьшается с увеличением скорости, на основании выражения электромеханических и механических характеристик можно построить семейство характеристик при варьировании величиной активного сопротивления в цепи якоря двигателя. Из этого семейства можно выделить естественные характеристики при Rдоп=0иUс=Uни искусственные характеристики, а также так называемые граничные характеристики идеализированной машины последовательного возбуждения, цепь якоря которой не содержит активного сопротивленияRя+Rов=0. Магнитная цепь такой идеализированной машины имеет те же характеристики, что и реальная машина.
![]() ;
;![]() .
.
Графики характеристик:
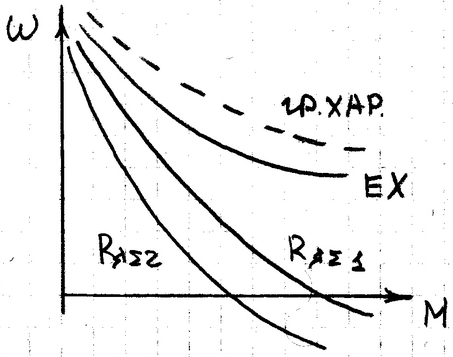 Rя1Rz2
Rя1Rz2
Универсальная характеристика (граничная).
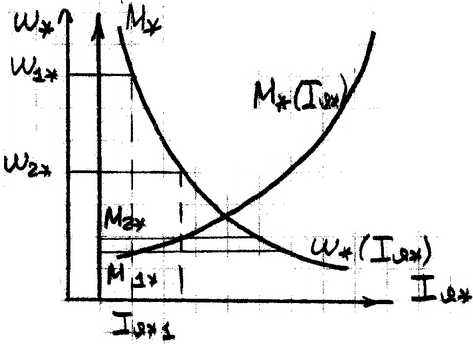
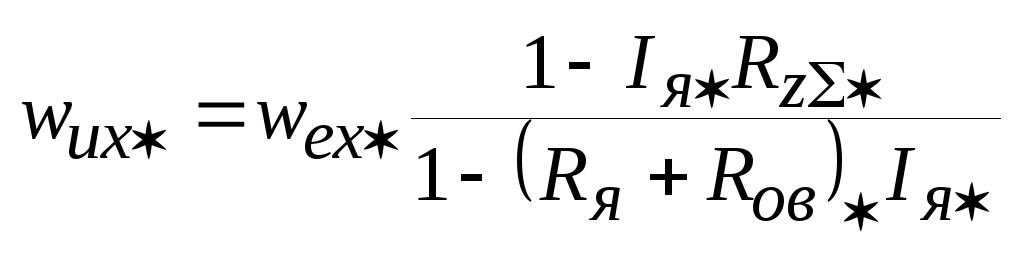
Если построить граничную характеристику в относительных единицах, то получим универсальную характеристику для всей серии машин, т.к. характеристики магнитных цепей магнитных систем двигателей одной сери можно считать подобными и, если такая кривая есть, то скорость двигателя при любом значении сопротивления якорых цепей будет определятся как: w=wгр(1-RяIя).
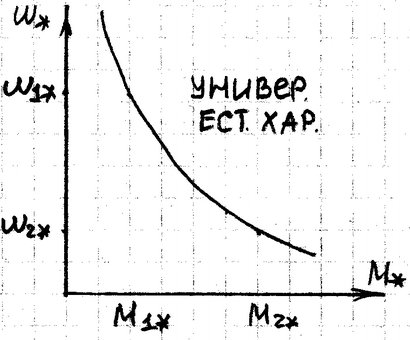
В литературе обычно используется универсальная скоростная естественная характеристика, где за базисную скорость принимают номинальную скорость. Но следует заметить, что жесткость таких характеристик зависит от сопротивления, а относительное значение (Rя+Rов)изменяется в широких пределах, то эти характеристики не являются универсальными в полном смысле слова для всех двигателей, универсальные естественные характеристики для одной серии машин обычно приводят до 10 кВт и выше 10 кВт.
Их вид следующий:
![]() ;
;![]() ;
;
![]() ;
; .
.
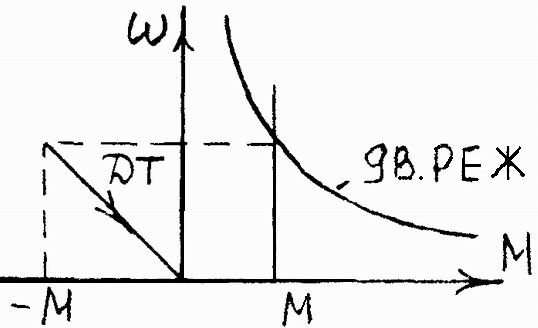
Тормозные режимы двигателя постоянного тока последовательного возбуждения.
Торможение двигателя с последовательным возбуждением возможно двумя путями: торможением противовключения и динамическим торможением.
Динамическое торможение бывает:
с независимым возбуждением;
с самовозбуждением.
Рекуперативное торможение для двигателя с последовательным возбуждением реализовать нельзя, т.к. w0 отсутствует.
Режим противовключения.
Режим торможения противовключением реализуется также, как и для двигателя с параллельным возбуждением. Существуют три способа торможения противовключением.
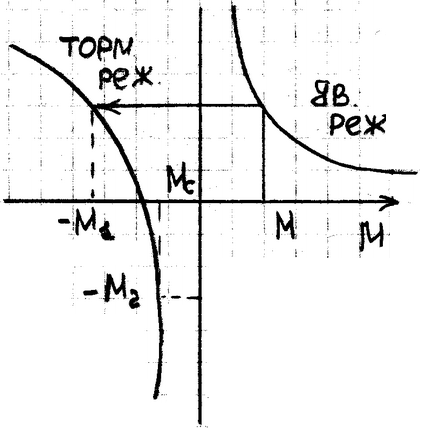
а) При приложении к валу двигателя движущегося активного момента, когда этот момент становится больше момента короткого замыкания и он вращает якорь двигателя в противоположную сторону, чем в двигательном режиме
 Rя1Rя2Rя3
Rя1Rя2Rя3
б) Переключение полярности на зажимах якоря двигателя
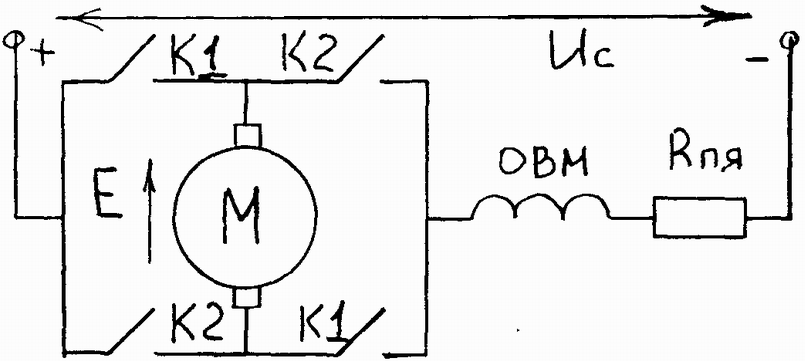
К1– вперед, К2– назад.
![]() ;Rпя=Rя-(Rя+Rов).
;Rпя=Rя-(Rя+Rов).
Если принять wmaxв относительных единицах равным единице(wmax=1), то ток якоряIяmax=22,5, то сопротивление общееRя=1,10,9при условии, что поток в относительных единицах приIяmax=22,5будет равенФ=1,191,22.
в) Возможен реверс изменением полярности на зажимах обмотки возбуждения двигателя, поскольку электромагнитная инерционность обмотки двигателя последовательного возбуждения мала.
Динамическое торможение.
Для двигателя последовательного возбуждения используются два вида динамического торможения с независимым возбуждением и с самовозбуждением.
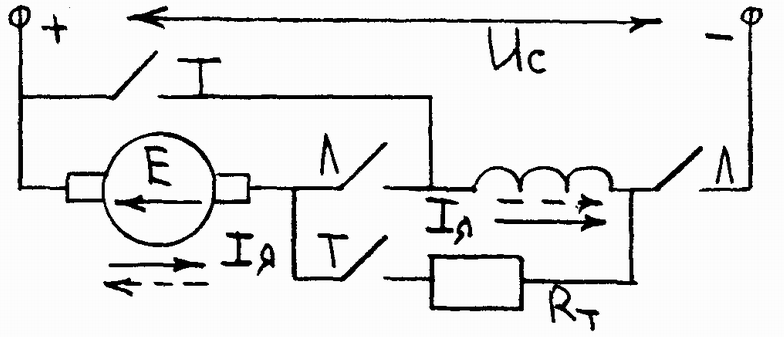
а) При независимом возбуждении обмотка возбуждения включается в напряжение сети, а обмотка якоря закорачивается на тормозное сопротивление.
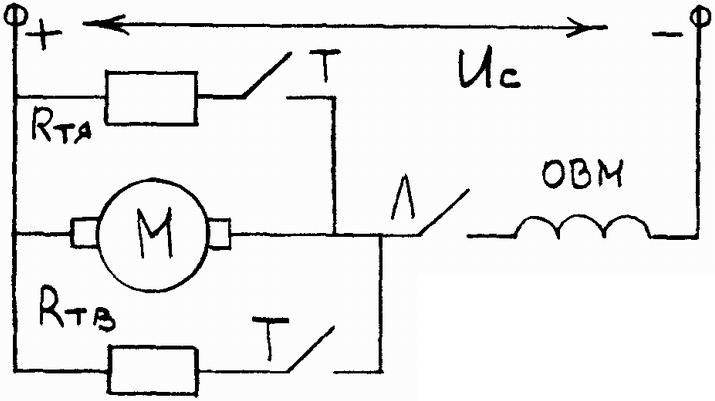
Двигательный режим:
Т – отключен, Л – включен.
Тормозной режим:
Л – отключен, Т – включен.
![]()
Основной недостаток этого способа торможения: цепь обмотки возбуждения потребляет большую мощность равную номинальной мощности двигателя.
Rт=UснIян
б) При динамическом торможении с самовозбуждением двигатель отключается от сети, его обмотка остается подключенной последовательно с якорем двигателя и подключается на тормозное сопротивление.
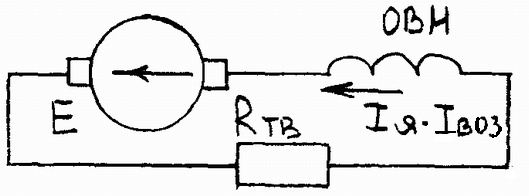
Процесс самовозбуждения происходит следующим образом: после отключения двигателя от сети, якорь продолжает вращаться под действием сил инерции и в его обмотке наводится ЭДС, обусловленная остаточным потоком возбуждения.
Под действием ЭДС двигателя в замкнутом контуре возбуждения возникает ток якоря равный току возбуждения. Ток возбуждения создает магнитный поток, который может быть направлен согласно или встречно остаточному потоку. Если встречно, то процесса самовозбуждения нет. При согласованном возбуждении появляется ток возбуждения увеличивающий поток машины, что приводит к увеличению ЭДС машины. Увеличивается ток возбуждения, а следовательно увеличивается поток машины, т.е. происходит лавинообразный процесс самовозбуждения до тех пор пока не наступит равновесие ЭДС и падения напряжения на активном сопротивлении силовой цепи.
Поэтому, для согласованния направленных потоков, необходимо сделать переключение. Если машина работает в двигательном режиме и переходит на динамическое торможение, когда величина и направление тока определяют ЭДС, необходимо сделать следующее переключение.