Точное регулирование скорости.
Для регулирования приводов характерным требованием является обеспечение заданного диапазона регулирования скорости при определенной точности регулирования скорости.
Точность - относительное отклонение скорости от заданного значения.
![]() ,
гдеwз–
заданное значение скорости.
,
гдеwз–
заданное значение скорости.
wmax– максимальное отклонение от заданного значения, обусловленное изменением момента нагрузки в заданном диапазоне.
На практике для оценки точности регулирования часто используют другой параметр, называемый статизмом механической характеристики, под которым понимают отношение скорости двигателя, вызываемого изменением нагрузки на его валу от идеального холостого хода до номинального значения к скорости холостого хода на данной регулировочной характеристике.
![]() ;
;![]() ;
;![]() ;
;![]() ;
; .
.
Из последней формулы видно, что в системе УП-Д при постоянстве жесткости механической характеристики со снижением скорости статизм уменьшается. Если заданна величина статизма, то минимальная скорость равна
![]() ;
;![]() .
.
Максимальная скорость берем равной wpmax=woe, тогда диапазон равен
![]()
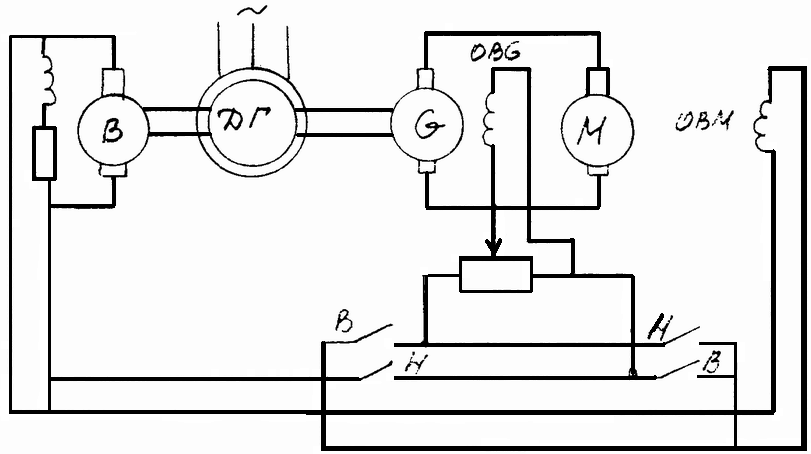
Регулирование скорости в системе Генератор-Двигатель (г-д).
В системе Г-Д управляемым является генератор постоянного тока, напряжение на выходе которого изменяется за счет изменения тока возбуждения.
Якорь двигателя непосредственно присоединяется к зажимам якоря генератора. Генератор приводится во вращение синхронным двигателем или асинхронным двигателем переменного тока.
Для питания цепей возбуждения Г-Д служат или возбудитель постоянного тока, соединенный с валом приводного двигателя или независимый источник питания.
Мощность генератора примерно равна мощности двигателя и мощности приводного двигателя. Электрической схемой такой системы выглядит следующим образом:
![]() ;
;![]() ;
;![]() ;
;![]() ;
;
![]() ;
;![]() ;
; ;
; .
.
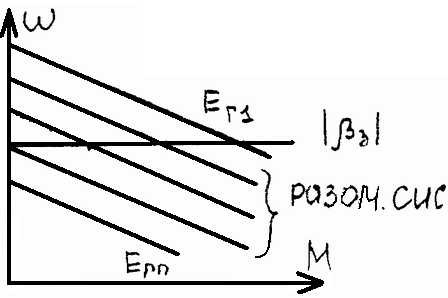
Механические характеристики:
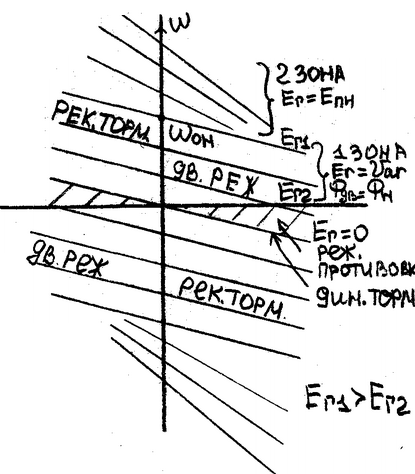
При гонном асинхронном двигателе механическая характеристика системы генератор-двигатель представляет собой семейство прямых, наклон которых уменьшается, соответственно увеличивается модуль жесткости при снижении потока генератора.
Система генератор-двигатель может работать как в двигательном режиме, тормозном режиме, противовключения и рекуперативном торможении.
Основным недостатком системы генератор-двигатель является то, что весь поток энергии проходит через преобразователь машины. КПД машины при постоянном токе относительно мощности двигателя к мощности генератора.
![]() ;
; .
.
Жесткость механической характеристики:
![]() .
.
Диапазон регулирования скорости:
1 зона: Д=715;
2 зона – ослабление потока: 1:8;
Общий диапазон (5690):1.
Преимущества системы генератор-двигатель:
управление Г-Д производится в цепях малой мощности;
отсутствуют громоздкие пусковые реостаты;
значительный диапазон регулирования скорости регулирования.
Недостатки:
высокая установившаяся мощность, превышающая в три раза мощность двигателя;
высокая стоимость машинного оборудования;
сравнительно низкий КПД вследствии трехкратного преобразования энергии;
повышенная крутизна механической характеристики.
Регулирование скорости в системе тп-д (тиристорный преобразователь-двигатель).
В настоящее время для питания двигателя постоянного тока независимого возбуждения наибольшее применение получили тиристорные преобразователи с фазовым управлением, меньше используются полупроводниковые выпрямители с регулированием величины выпрямительного напряжения методом широтно-импульсного регулирования.
Основу схем тиристорных преобразователей составляет управляемые силовые полупроводниковые приборы – тиристоры, одно-операционные тиристоры. Неполная управляемость тиристоров определяется тем, что включающийся тиристор контролируется системой управления: тиристор открывается после подачи отпирающего импульса и остается открытым после снятия импульса. Закрывается тиристор после изменения полярности анод-катод и спадания тока до нуля. Так как применяются в основном одно-операционные тиристоры, запирание тиристоров в цепи управления невозможно.
Тиристорные преобразователи в схеме электропривода выполняют функцию выпрямления переменного напряжения питающей сети и регулирования средней величины выпрямительного напряжения.
Наиболее распространены силовые схемы электропривода в системе ТП-Д являются:
однофазная мостовая нереверсивная схема;
трехфазная мостовая нереверсивная схема;
трехфазная мостовая встречно-параллельная реверсивная схема с раздельным управлением.
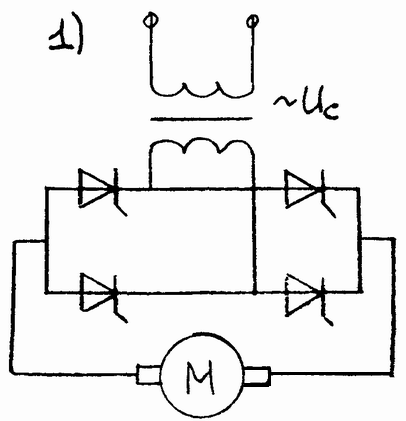
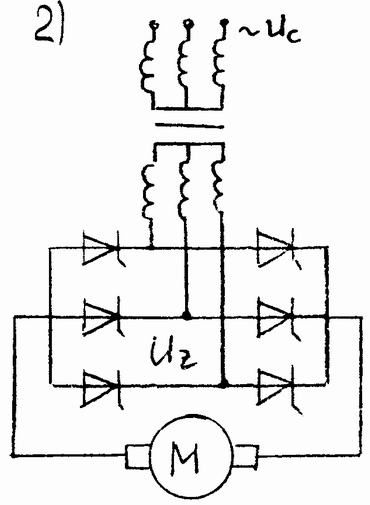
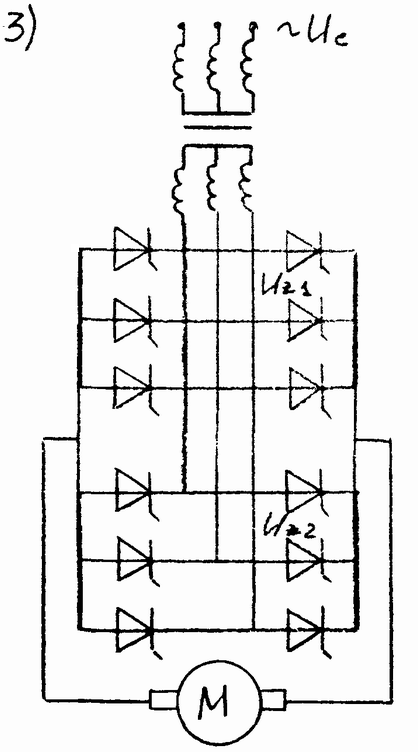
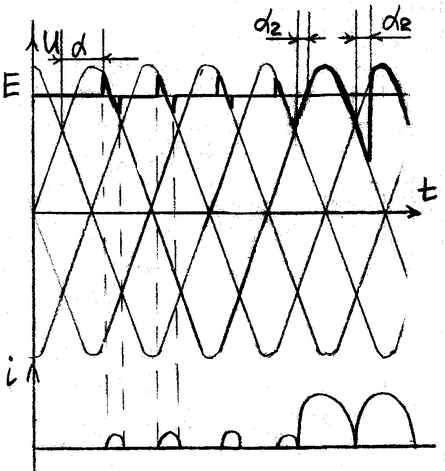
Все типы вентилей выполняют роль ключей, пропускающих ток, в проводящую часть периода, когда на аноде плюс и подан управляющий импульс. И запирающиеся – в не проводящую часть периода. Такие вентили называются ключами с ограниченным управлением.
Эквивалентная схема:
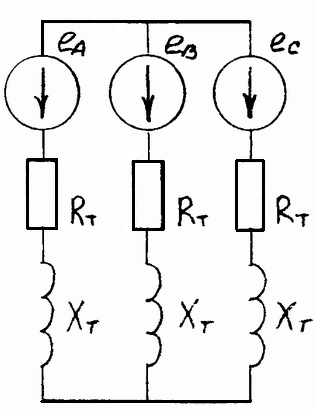
m– число фаз. В трехфазной нулевой схемеm=3.
![]() - нулевая схема;
- нулевая схема;
![]() -
мостовая схема.
-
мостовая схема.
Выпрямитель напряжения:
![]() ;
;![]() .
.
Uв– падение напряжения на вентиле.
![]() - для нулевой схемы.
- для нулевой схемы.
Rсд– сглаживающий дроссель.
![]() - для мостовой схемы.
- для мостовой схемы.
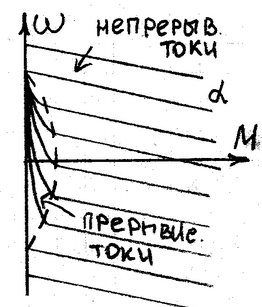
Уравнение механической характеристики при непрерывном токе управления механической характеристикой, движение в системе ТП-Д следующее:
![]() .
.
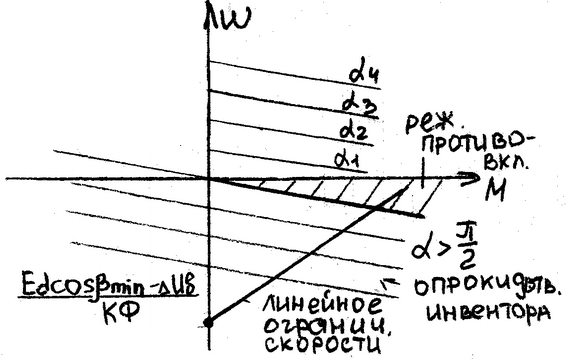
Механическая характеристика для этого случая выглядит следующим образом:
 123/2
123/2
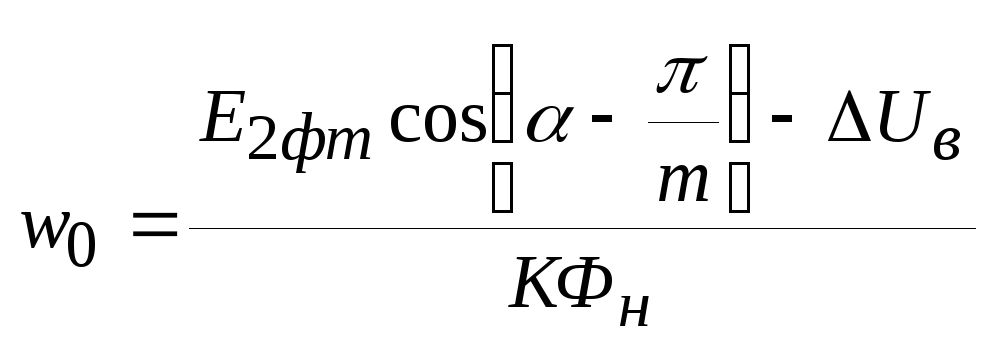
В реальном преобразователе с конечной длиной сглаживающего дросселя скорость идеального холостого хода при заданном будет отличаться от выражения:
![]() .
.
При холостом ходе, когда выпрямительный ток стремится к нулю, наступает режим прерывистых токов, при котором длительность прохождения токов вентилей =2/m.
В этом случае кривая тока содержит интервалы нулевого тока. Выше приведенное соотношение для выпрямителя ЭДС в режиме прерывистых токов недействительно. Переход от режима непрерывного тока к режиму прерывистого тока соответствует режиму в начале непрерывного тока. Является граничным между этими двумя режимами. В граничном режиме отсутствует коммутация вентилей, но нет интервалов нулевого тока.
![]() .
.
В граничном режиме для расчета механических характеристик в режиме прерывистого тока решают два уравнения:
![]() ;
;![]() ;
;
 ;
;
![]() при
при![]() ;
;
 при
при![]() .
.