

Искусственные механические реостатные характеристики асинхронного двигателя.
Формулы для искусственных характеристик отличаются от естественных, тем что вместо активного сопротивления фазы ротора R2используется полное сопротивлениеR2линия фазы ротора. Все приведенные выше формулы для асинхронного двигателя являются универсальными и могут использоваться для построения как естественных электромеханических и механических характеристик так и искусственных.
Рассмотрим, как зависит от активного сопротивления линия ротора критического скольжения:
 - естественная;
- естественная; - искусственная.
- искусственная.
 .
.
Из
 ,
гдеaSk=const,Mk=constвидно, что моменты будут одинаковы,
когда существуют следующие соотношения
скольжения.
,
гдеaSk=const,Mk=constвидно, что моменты будут одинаковы,
когда существуют следующие соотношения
скольжения.
![]() ;
; .
.
Таким образом, при любых одинаковых моментах для искусственной и естественной характеристики асинхронного двигателя, скольжение на искусственной характеристики во столько раз больше, чем на естественной во сколько R’2R’2.
Для номинального момента:
 ;
;![]() .
.
На прямолинейном участке механической характеристики можно записать следующие соотношения:
 ;
;![]() , Se– текущее состояние.
, Se– текущее состояние.
![]() ;
; ;
; .
.
Механические характеристики синхронного двигателя.
Синхронный двигатель применяется для приводов механизмов, скорость которых не регулируется. Синхронный двигатель имеет достаточно высокий cos, КПД, обладает повышенной надежностью, вследствии значительного воздушного зазора между статором и ротором двигателя. Синхронный двигатель чаще всего используется в установках с длительным режимом работы, особенно для приводов большой мощности. Двигатель применяется для привода компрессора и насосов, как двигатель-генератор, для приводов средней мощности бумажной и цементной промышленности и т.д.
В настоящее время в связи с развитием полупроводниковых технологий появился регулируемый электропривод на базе синхронного двигателя, где регулирование производится изменением частоты питающего напряжения.
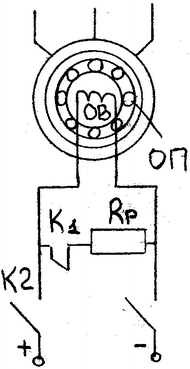
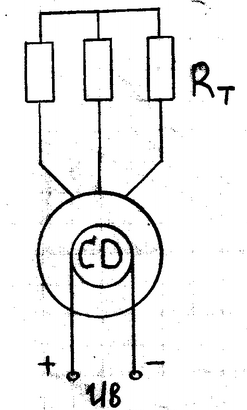
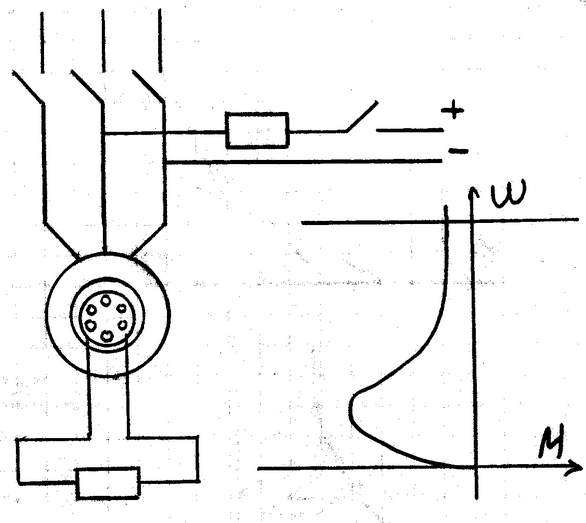
На статоре вложена трехфазная обмотка, на роторе обмотка возбуждения и пусковая обмотка. При пуске обмотку возбуждения включают на разрядное сопротивление Rр. При достижении скорости0,95w0подается возбуждение и включаетсяRр. Двигатель втягивается в синхронизм.Rр=(510)Rов.
Если взять Rр достаточно большим, то в обмотке возбуждения наблюдается большие перенапряжения, если взять - малым, то искажается пусковая характеристика синхронного двигателя. Пусковая характеристика от обмотки «беличья клетка» аналогична асинхронному двигателю.
Синхронный двигатель выполнен с пусковыми клетками двух типов, что позволяет получить различные характеристики необходимые для различных механизмов.
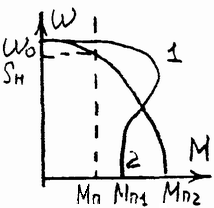
Для второй характеристики, вследствие повышения активного сопротивления «беличьей клетки», соответствует наибольший пусковой момент. Но ей соответствует большее скольжение при номинальном моменте, что затрудняет вхождение в синхронизм. Двигатель с такой пусковой характеристикой применяется для механизмов с большим пусковым моментом.
Первая характеристика используется для механизмов при вентиляторном моменте.
Устойчивость системы синхронного двигателя характеризуется угловой характеристикой или зависимостью момента от угла внутреннего сдвига фаз между вектором ЭДС и напряжением сети.
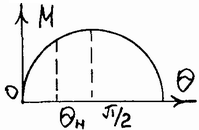
н=(2530)эл. град. – номинальнаяL нагрузки.
Устойчивая область работы двигателя от 0до/2.
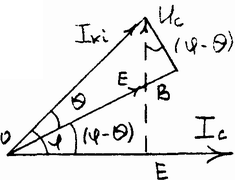
Векторная диаграмма:
![]()
Из ОВЕиОАЕ:ОЕ=Uccos=Ecos(-).
Из ОАСиАВС:АС=Ucsin=IcXccos(-).
![]() ;
;![]() ;
;
![]() ;
;![]() - при900.
- при900.
![]() .
.
Анализ зависимостей момента от показывает, что асинхронный двигатель менее чувствителен к снижению напряжения, чем синхронный двигатель.
Наибольшее значение момента, характеризующего перегрузочную способность синхронного двигателя, наблюдается при угле согласования =/2. При этом будет максимальный момент
![]() .
.
Вместе с тем важной характеристикой работы синхронного двигателя является величина угла рассогласования, который находится в пределах 300-250=н. Этот угол характеризует двигательный режим работы двигателя по условиям нагрева.
Для повышения устойчивости работы синхронного двигателя при ударных нагрузках применяют автоматическое поддержание ЭДС двигателя за счет перевозбуждения двигателя.
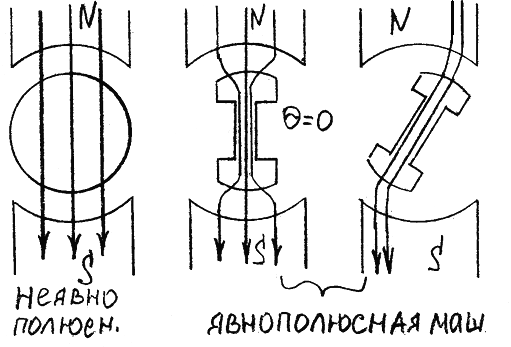
Для неявнополюсной машины момент при синхронной скорости может возникнуть только при наличии тока в обмотке возбуждения при явнополюсной машине, момент возникает и без возбуждения синхронного двигателя. Здесь возникает реактивный момент, который старается так повернуть полюса машины, чтобы сохранить минимальным магнитное сопротивление по продольной оси.
Синхронный двигатель отличается от другой машины тем, что с его помощью можно регулировать потребление реактивной энергии. Это объясняется тем, что если принять активное сопротивление статора равным нулю, то ЭДС двигателя без нагрузки будет равна напряжению сети. Она определяется результирующим магнитным полем, намагничивающих сил статора и намагничивающих сил обмотки возбуждения, и, в этом случае когда ток возбуждения отсутствует, весь поток создается статором, синхронный двигатель потребляет реактивный ток и тот отстает от напряжения сети на 900. Если машину возбудить, то часть результирующих намагничивающих сил будет создана обмоткой возбуждения и тогда намагничивающий ток статора, а следовательно и потребляемая энергия из сети уменьшится. Дальнейшее увеличение возбуждения двигателя приведет к размагничиванию магнитной системы двигателя.
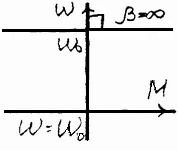
Перевозбуждение машины заставляет работать двигатель в емкостном квадранте, работать генератором реактивной энергии. Синхронный двигатель характеризуется U-образными характеристиками, это зависимость полного тока статора от тока возбуждения при различных нагрузках.
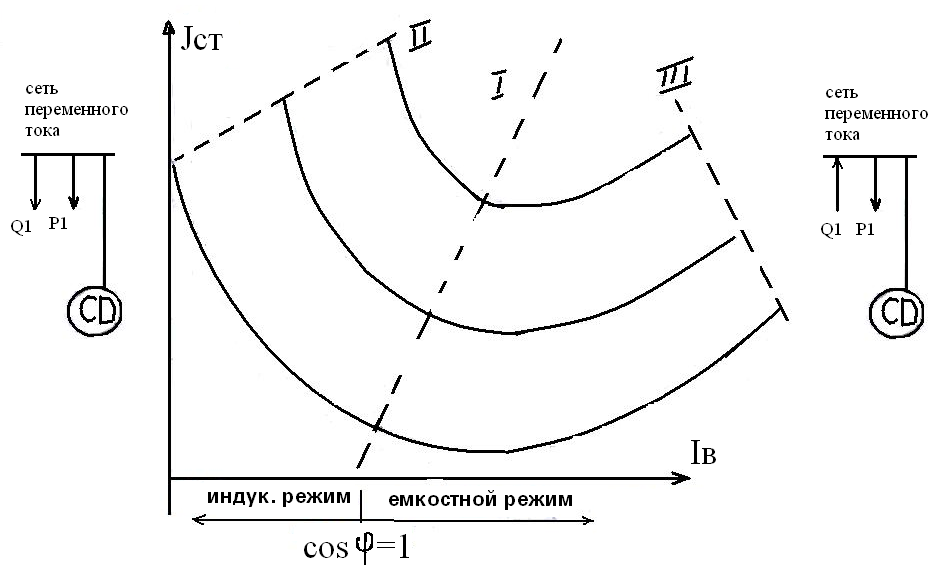
Кривая II– характеризует границу устойчивости статической работы двигателя.
Кривая I– регулировочная характеристика двигателя приcos=1.
Кривая III– соответствует верхней границе возбуждения двигателя по условиям нагрева двигателя и самораскачивания.
Синхронный двигатель может работать в тех же тормозных режимах, что и асинхронный и другие двигатели, т.е. режим с рекуперацией энергии в сеть, режим динамического торможения и режим противовключения.
1) 2)
2)
Торможение противовключением. В этом случае происходит изменение чередования фаз, обмотка возбуждения закорачивается на разрядное сопротивление.
