

Механика электропривода. Механические звенья электропривода.
Механическая часть электропривода состоит из трех основных частей:
Ротор (якорь) двигателя - обладает определенным моментом инерции, вращается с некоторой скоростью и развивает движущий или тормозной момент. В целом двигатель представляет собой потребитель или источник механической энергии.
Преобразовательный механизм – реализует преобразование движения. С его помощью можно уменьшить или увеличить скорость привода, изменить вид движения от вращательного к поступательному и наоборот и т.д. К преобразовательным механизмам относят редукторы, все виды передач и т.д. Преобразовательный механизм характеризуется инерционностью, упругостью его элементов с зазорами и трением в зацеплениях и сочленениях преобразовательного механизма.
Рабочий орган производственной машины – реализует подводящую механическую энергию в полезную работу, чаще всего является потребителем энергии, в этом случае поток механической энергии направлен от двигателя к рабочей машине. В некоторых случаях рабочий орган может быть и источником энергии, тогда она дает механическую энергию двигателю. Рабочий орган характеризуется инерционностью рабочего момента при вращательном движении или рабочим усилием при поступательном движении. При передаче энергии рабочему органу или наоборот возникают потери в подшипниках на трение, потери в вязких трениях. Потери покрываются источником энергии или двигателем - при прямом потоке энергии или рабочим органом машины – при обратном потоке электрической энергии.
Структура механической части.
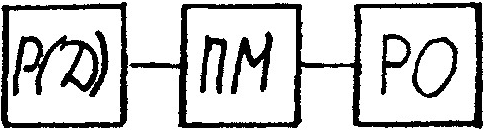
Р – ротор, Д – двигатель, ПМ – преобразовательная машина, РО – рабочий орган.
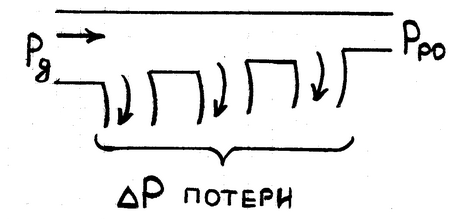
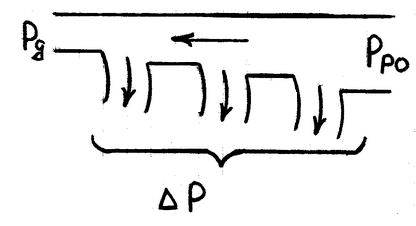
Энергетические диаграммы.
а) при работе двигателя источником механической энергии.
б) при работе двигателя потребителем механической энергии.
Работа, совершаемая двигателем или рабочим органом определяется следующим образом:
При вращательном движении
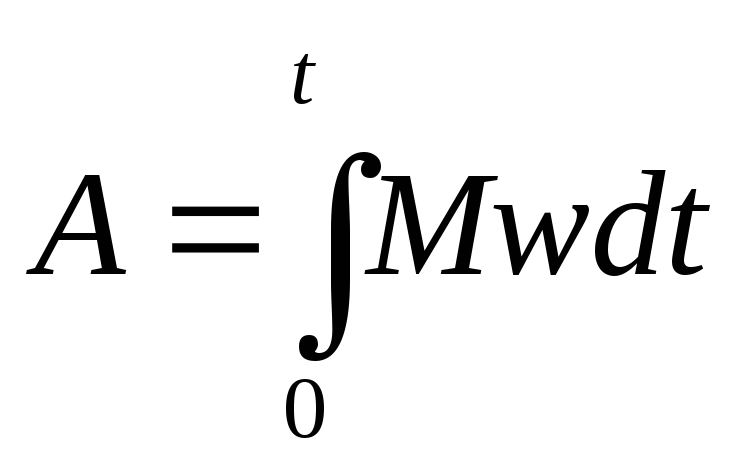 .
.При поступательном движении
 .
.
Механическая мощность:
При вращательном движении
 .
.При поступательном движении
 .
.
FиМ– сила и момент [HиHм].
wиV– скорости вращательного и поступательного движения [рад/с и м/с].
Приведение статических моментов усилий и моментов инерции к одной оси.
Механическая часть электропривода представляет собой сложную кинематическую цепь с большим числом движущихся элементов. Можно допустить, что механическая часть состоит из абсолютно жестких недеформированных элементов с постоянными массами и не содержит зазоров. При этом движение каждого из элементов дает полную информацию о движении всех остальных элементов. И в этом случае движение электропривода можно рассматривать на любом одном механическом элементе, к которому приведены все внешние моменты, силы и инерционные массы других элементов. Обычно за такой элемент принимают вал двигателя.
Приведение статических элементов и усилий к вращательному движению двигателя.
Для привидения к валу двигателя момента или усилия нагрузки рабочего органа можно воспользоваться балансом мощности из энергетической диаграммы механической части привода.
Передача энергии от двигателя к рабочему органу. Вращательное движение рабочего органа.
![]() ;
;![]() ;
;![]() ;
;
М0– момент сопротивления.
w – скорость вращения вала двигателя.
![]() ;
;![]() ;
; ,
где
,
где![]() .
.
При поступательном движении
![]() ;
;![]() ;
; ,
,
где - радиус приведенных усилий нагрузки к валу двигателя.
Передача движения от рабочего органа к двигателю.
![]() ;
;![]() .
.
При вращательном
движении:
![]() ;
;![]() ;
;![]() .
.
При поступательном
движении:
![]() ;
;![]() .
.
Значение передаточного
числа iи радиуса
приведения
определяется конструктивными
параметрами преобразования механизмов.
Пример: Передаточное число для зубцовой
передачи определяется отношением числа
зубцов; ременная передача – отношением
диаметра шкивов. Радиус приведения для
шкивов и барабанов равен их конструктивным
радиусам, а для кривошипным механизмовRk
lk,![]() ,
гдек– угол поворота кривошипа.
,
гдек– угол поворота кривошипа.