

Приведение инерционных масс и моментов инерции в механических звеньях вала двигателя при вращательном движении.
Заключается в том, что эти массы и моменты инерции заменяются одним эквивалентным моментом инерции на валу двигателя. При этом необходимым условием приведения является равенство кинетической энергии, в определенном эквивалентном моменте энергии на валу двигателя, сумме кинетической энергии двигателя всех движущих масс в механической части привода т.е.
![]()
w-скорость вращения вала двигателя
![]()
J– приведенный момент инерции к валу двигателя;
Jдв – момент инерции ротора двигателя (кгм2)
Если в
каталоге указана величина махового
момента, то в системе СИ момент инерции
будет:
![]()
Ji– момент инерцииi-ого вращающего механизма,
mj– массаjпоступательно-движущегося элемента (кг),
![]() - передаточное отношение редукторов от
вала двигателя доiвращательного элемента,
- передаточное отношение редукторов от
вала двигателя доiвращательного элемента,
![]() - радиус приведения поступательно-движущегося
элемента.
- радиус приведения поступательно-движущегося
элемента.
Приведение статических нагрузок и инерционных масс к поступательному движению.
При приведении вращающего движения к поступательному, на рабочем органе величина приведенного усилия будет зависеть от направления передачи энергии.
1 случай: передача энергии от двигателя к поступательно движущимся элементам привода
![]() ;
;![]()
2 случай: направление передачи механической энергии от механизма к валу двигателя.
![]() ;
;![]()
Fp– приведенное усилие,
М– момент, создаваемый на валу двигателя,
ро– радиус приведенного поступательно-движущегося элемента к валу.
В случае приведения маховых масс к рабочему органу, максимальные массы заменяются одной результирующей массой на рабочем органе, которая определяется из условия сохранения полного запаса кинетической энергии.
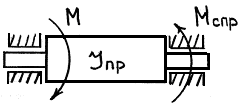
Понятие о приведенном механическом звене и одномассовой системе электропривода.
Из приведенного выше соотношения следует, что при приведении инерционных масс и моментов сопротивления к вращающему движению, сложная в кинематическом отношении механическая часть электропривода, заменяется эквивалентным или приведенным механическим звеном. Это звено представляет собой твердое тело, вращающееся вокруг осевой линии со скоростью двигателя, которая обладает моментом инерции равной Jпри находится под воздействием момента двигателя и приведенного момента сопротивления.
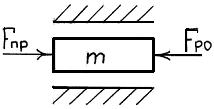
В случае приведения инерционных масс и момента сопротивления к поступательному движению приведенное механическое звено представляет собой поступательно-движущуюся массу, к которой приложены две силы - приведенная и сила рабочего органа.
Таким образом полученная простая модель механической части электропривода в виде одномассовой системы, справедлива для механических звеньев без упругости и зазоров. Такое представление о кинетической системе электропривода (в виде одномассовой системы) может быть сохранено в большинстве случаев для механических звеньев, обладающих небольшими зазорами и незначительной механической упругостью.
Пример: привести статический момент и момент инерции к валу кинематической схемы грузоподъемной лебедки.
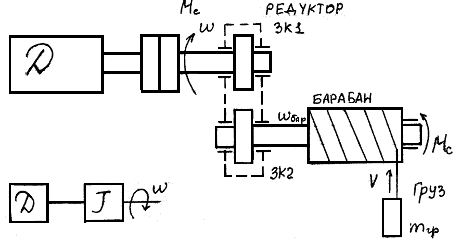
G=mгрg; Mcбар=mгрgRбар; ![]() .
.
Активный статический момент на валу барабана создается силой тяжести груза на крюке лебедки.
Момент, прикладываемый к валу лебедки. Для случая подъема груза, приведенный статический момент на барабане к валу двигателя будет равен
![]()
Приведенный момент инерции поступательного движения к вращающему движению барабана определяется:
![]() ;
;![]() так какV=wбарRбар.
так какV=wбарRбар.
Тогда суммарный приведенный момент энергии к валу двигателя равен:
![]()