

Реверс в системе тп-д.
Управляемый преобразователем двигатель может работать в двигательном, генераторном режиме, динамическом торможении и торможении противовключения.
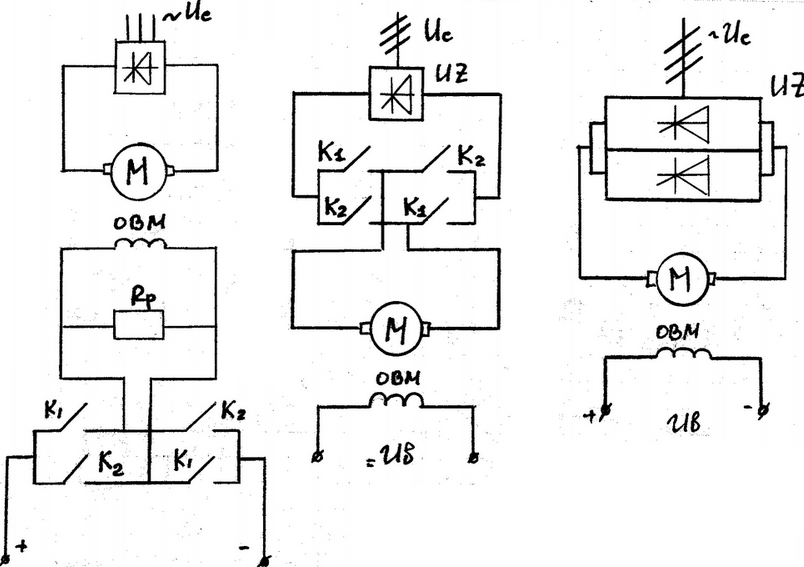
На практике применяют 3 способа изменения направления момента двигателя:
1 способ: Изменение направление потока двигателя изменением направления тока двигателя.
2 способ: Изменение полярности на зажимах якоря с помощью контактного реверса.
3 способ: Изменением полярности напряжения на якоре двигателя с помощью применения двух групп вентильных преобразователей.
На первый взгляд наиболее простой и дешевой схемой является схема 1. Недостатком этой схемы является большая продолжительность реверса привода до 2,5 с. Для уменьшения времени реверса необходима форсировка возбуждения, это возможно когда обмотка возбуждения питается от независимого регулируемого источника питания и габариты установленного оборудования в цепи возбуждения станка , соизмеримы также по мощности с силовыми устройствами якоря двигателя.
Вторая схема с реверсом позволяет достаточно быстро осуществить реверс, но здесь для уменьшения габаритов реверса необходимо соблюдать определенную последовательность операций в процессе управления реверсом и торможением. Это связано с тем, чтобы уменьшить габариты реверса и, следовательно, произвести переключение реверса в бестоковую паузу. С этой целью в начале реверса преобразователь переводится в инверторный режим =150 0С, контролируемый наличием тока, и, при токе равном нулю, производится переключение реверса. Далее идет уменьшение угла управления. Рекуперативное торможение и при переходе через угол90 0С двигатель запускается плавно в другую сторону.
Третья схема для приводов, где требуется большое быстродействие при реверсе, а также, если необходим двигательный и тормозной режим при одном и том же направлении /вращения, применяется схема с двумя комплектами вентилей, каждая из которых проводит ток в одном направлении.
При двухкомплектном преобразователе один работает в режиме выпрямителя или инвертора, а другой закрыт или подготовлен для работы в режиме инвертора или выпрямителя.
Для исключения передачи энергии ЕdиEdв. Режим работы реверсивного вентильного преобразователя определяется способами управления обоими комплектами вентилей.
Различают следующие способы управления:
Совместное-согласованное линейное управление.
Совместное не линейное управление.
С автоматическим регулированием уравнительного тока.
С раздельным управлением.
При согласованном линейном управлении:
1+2=- без учета падения напряжения на вентиле.
1=2– с управлением инвертора.
Электромеханическая характеристика.
Недостатком согласованного линейного управления является наличие большого уравнительного тока, достаточно большая установочная мощность трансформатора и не полное использование трансформатора, так как 1min=2min. С целью уменьшения уравнительных токов используется совместное нелинейное управление или несогласованное.
Совместное нелинейное согласованное управление.
При этом способе нарушается линейность управления, ухудшается использование трансформаторов, уменьшаются габариты уравнительного тока. 1+2=+Е.
На практике используется система, когда реализуется регулирование величины уравнительного тока. Для полного исключения уравнительных токов применяется раздельное управление комплектами, при этом управляющие импульсы подаются только на рабочий комплект, не рабочий комплект заперт.
Для изменения режима в начале управляющие импульсы рабочего комплекта переводят в инверторный режим, гасится запасенная электромагнитная энергия в якорной цепи привода, контролируется наличие тока и, как только ток будет равен нулю, снимаются управляющие импульсы с рабочего комплекта и, с паузой 510 мс, включается второй комплект и идет торможение.
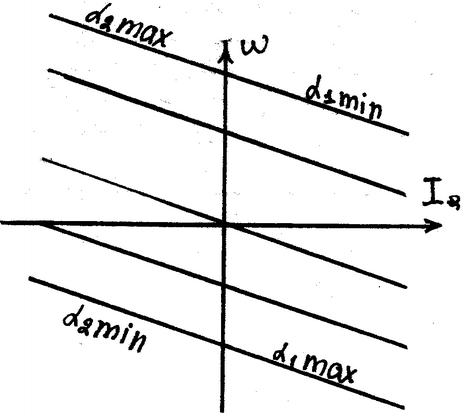
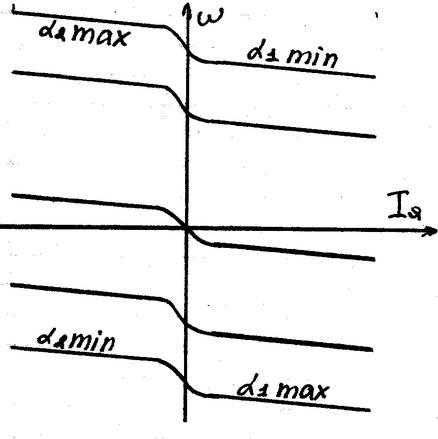
При линейном согласовании и раздельном управлении механические характеристики будут выглядеть следующим образом:

При раздельном управлении улучшается использование трансформатора. В этой схеме снижается вероятность опрокидывания инвертора, увеличивается КПД привода вместе с тем появляется интервал, пауза в управлении и, этот способ управления не используют для электроприводов с малыми токами холостого хода.
Лучшими динамическими характеристиками обладают электропривода с совместным согласованным управлением коллекторами.