

Параметрическое регулирование скорости асинхронного двигателя.
 ;
;![]() .
.
Способы параметрического регулирования скорости асинхронного двигателя видны из анализа механической характеристики двигателя.
К параметрическим способам регулирования относятся:
Способ изменения активного сопротивления в цепях статора и ротора.
Реостатное регулирование изменением реактивного сопротивления в цепях ротора и статора.
Изменение числа пар полюсов.
Критическое скольжение
 ;
;
При введении сопротивления в цепь обмоток фаз ротора меняется критическое скольжение, а критический момент остается постоянным.
Если мы принимаем приведенный ток ротора I'2=const, то, как видно из выражения тока ротора, между скольжением и сопротивлением существует линейная зависимость
 ;
;![]() ; где
; где - постоянно.
- постоянно.
![]() ;
;![]() -
изменение сопротивления в цепи ротора.
-
изменение сопротивления в цепи ротора.
Механические характеристики могут записаться следующим образом:
![]() ;
; ;
;![]() ;
;
 ;
;![]() .
.
Отметим, что cosасинхронного двигателя при реостатном регулировании скорости двигателя изменением сопротивления в цепи ротора и в случае постоянного момента не изменяется и это следует из следующего выражения
 .
.
Реостатное регулирование асинхронного двигателя изменением сопротивления в цепи статора.
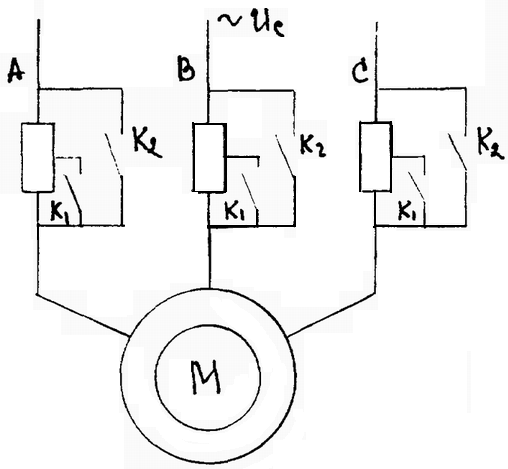
 ;
;
1R1>2R1
Из механической характеристики видно, что с увеличением дополнительного активного сопротивления статора уменьшается критический момент, максимальный момент, критическое скольжение и это приводит к сужению рабочего участка и к снижению жесткости.
![]() ;
;
Sне=0,020,13
Регулирование скорости асинхронного двигателя. Изменение числа пар полюсов.
Этот
способ применяется для короткозамкнутых
двигателей. Регулирование скорости
ступенчатое. Принцип такого способа
регулирования видно из применения
скорости идеального холостого хода
![]() .
.
Для изменения числа пар полюсов необходимо, чтобы в пазы статора были вложены независимые обмотки с разными значениями числа пар полюсов, либо при одной обмотке имелась бы возможность изменять ее схему соединения.
Изменение числа пар полюсов за счет нескольких независимых обмоток приводит к повышенным габаритам двигателя, но при этом возможно любое соотношение числа пар полюсов двигателя. Как правило, многоскоростной двигатель выполнен с двумя независимыми обмотками с отношением числа пар полюсов от 3:1 до 12:1.
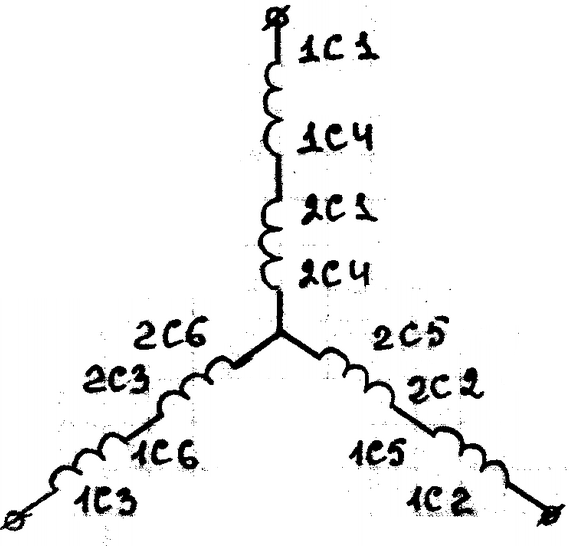
Для двигателей с переключением числа пар полюсов и изменением схемы обмотки статора каждой фазы, обмотка состоит из двух частей, в одной из которых меняется направление тока путем переключения этих частей согласно последнему соединению на встречно-последовательное или встречно-параллельное соединение. Такое переключение приводит к уменьшению числа пар полюсов вдвое, но скорость возрастает в два раза.
w0II=w0III=2w0I
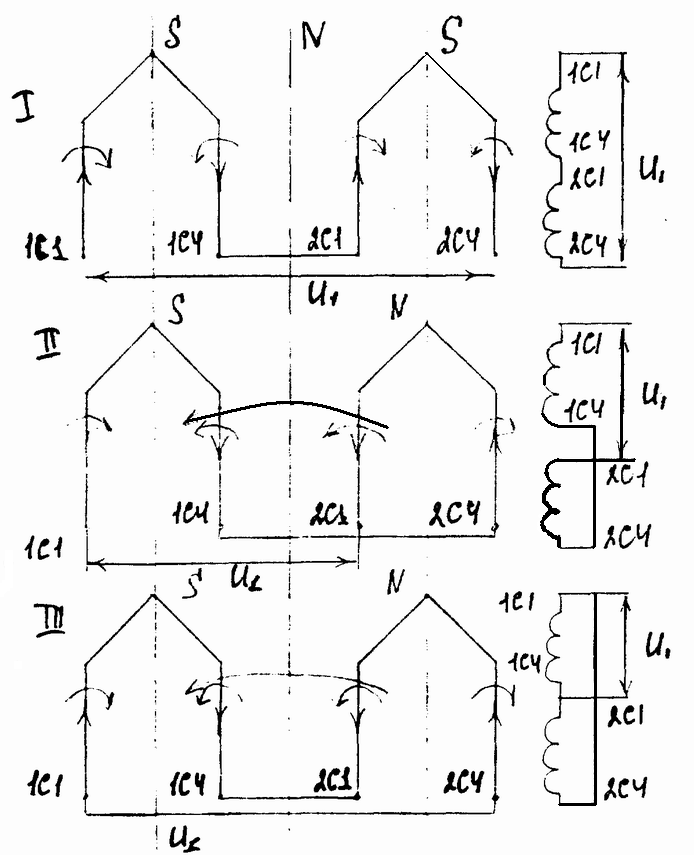
При допустимом токе секции равная номинальная мощность для всех соединений будет следующая:
PдопI=3U1I1нcosI– последовательное согласное;
PдопII=3U1I1нcosII– последовательное встречное;
PдопIII=3U12I1нcosIII – последовательное параллельное.
Допустимый момент
![]() ;
;![]() ;
;![]() .
.
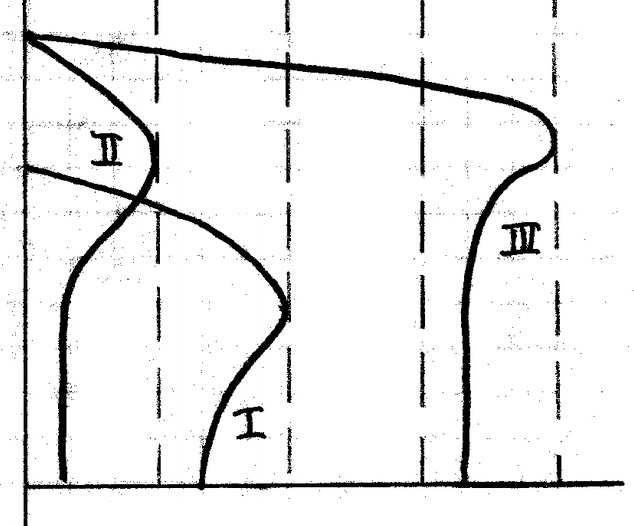
Из полученного выражения видно, что с уменьшением числа пар полюсов с переходом с согласно-последовательного включения на встречно-последовательное включение, допустимая мощность остается постоянной, т.е. регулирование скорости производится при постоянной мощности. Тогда как при увеличении скорости перехода согласно- последовательного включения на параллельное включение, допустимый момент не изменяется, т.е. регулирование идет с постоянным моментом.
 ;
;
 ;
;
 .
.
![]() ;
;![]() .
.
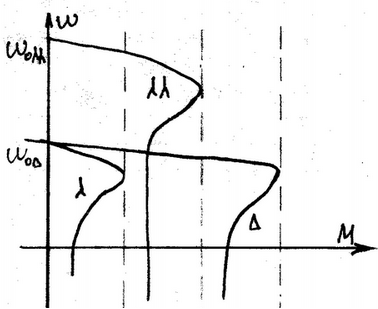
Механические характеристики.
![]()
При параллельном соединении перегрузочная способность растет вдвое. Наибольшее практичное применение получили схемы переключения со звезды на двойную звезду и переключение с треугольника на двойную звезду.
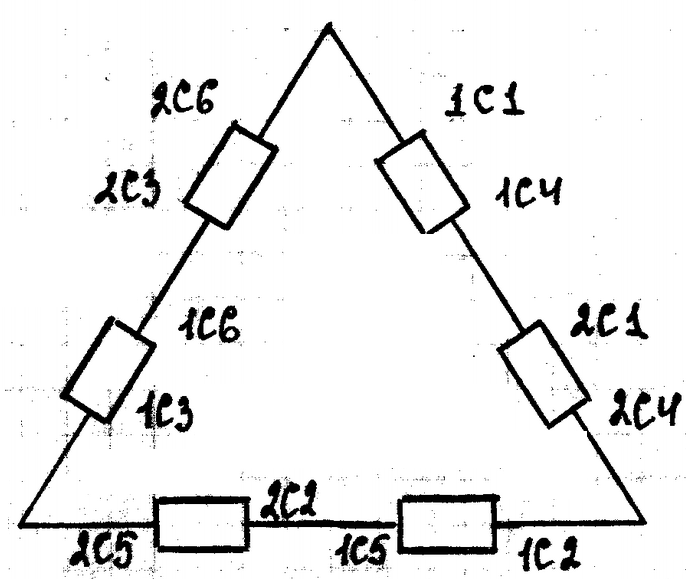
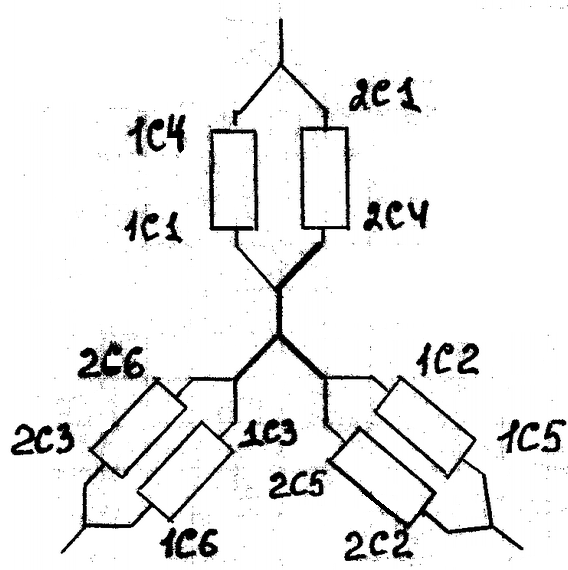
Переключение с треугольника на двойную звезду. Характеристики аналогичны схеме переключения согласно-последовательного включения на параллельное, т.е. идет регулирование при постоянном моменте.
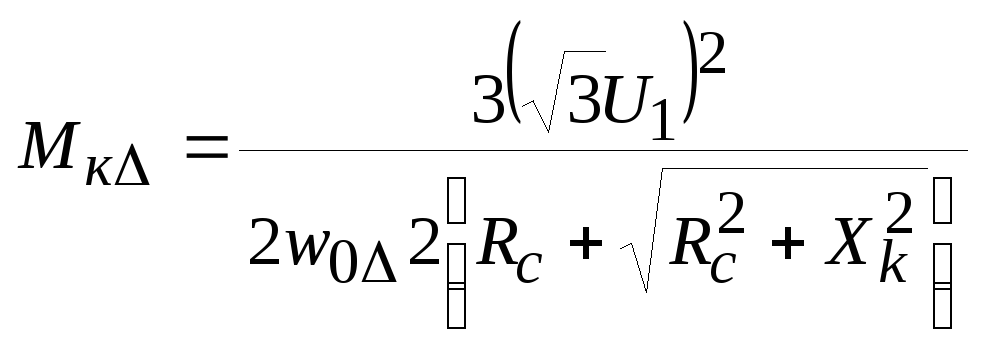
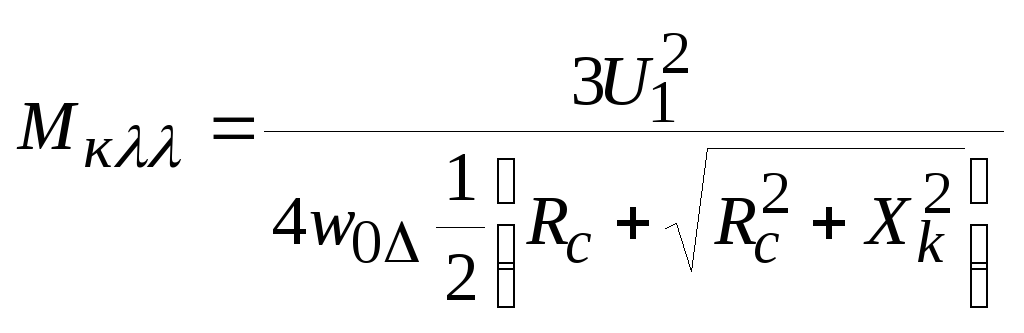
Допустимая мощность:
![]() ;
;![]()
РдопРдоп ,т.к.cosтреугольника за счет потребления реактивной энергии больше.
coscosза счет потребления реактивной энергии.
![]() ;
;![]() ;
;![]() .
.
 ;
; ;
;
![]() ;
;![]() ;
;![]() .
.
Из всех параметрических способов регулирования скорости изменение числа пар полюсов наиболее прост для практической реализации, и наиболее экономичен, так как в нем значительно меньше максимальные потери скольжения.