

Энергетические показатели.
![]() ;
; ;
;![]() .
.
Коэффициент мощности управления постоянного тока определяется углом сдвига первой гармоники тока и коэффициентом искажения.
![]() ;- угол между напряжением и первой
гармоникой тока.
;- угол между напряжением и первой
гармоникой тока.
![]() ;I1– первая
гармоника тока;I–
действительное значение тока
преобразователя.
;I1– первая
гармоника тока;I–
действительное значение тока
преобразователя.
![]() ;
коэффициент мощности 0,10,8.
;
коэффициент мощности 0,10,8.
Система электропривода переменного тока с преобразователем частоты.
Частотное регулирование является перспективным способом регулирования скорости асинхронного двигателя с коротко замкнутым ротором. Большим достоинством является использование в такой системе простой и надежной асинхронной машины с короткозамкнутым ротором. Здесь при регулировании небольшие потери электрической энергии и есть возможность получения высоких скоростей механизмов.
Частотный способ
управления двигателя с короткозамкнутым
ротором дает возможность получить для
механизмов высокую скорость и повысить
надежность электропривода, с точки
зрения технической безопасности. При
использовании их в химической
промышленности в защищенном исполнении
определяется формулой
![]() .
.
При регулировании скорости асинхронного двигателя изменением частоты питания сети возникает необходимость в регулировании напряжения источника питания Е=сФf1. Приrc0, для больших машин,U1Eдв;ЕсФf1=const.
При уменьшении частоты, увеличивается магнитный поток, а следовательно увеличивается ток статора, I1,I1,идет перегрев обмотки статора.
При увеличении частоты магнитный поток уменьшается, и следовательно М=КФI2cos,- угол междуI2и ЭДС двигателя.
Если на валу Мс=const,Ф,I2перегрев обмотки ротора.
Поэтому для наилучшего использования асинхронного двигателя при регулировании скорости изменением частоты напряжения, необходимо изменять функцию частоты и нагрузки. Регулирование напряжения функцией частоты можно реализовать в разомкнутых системах. Реализация зависимости напряжения функции нагрузки, момента сопротивления возможно только в замкнутых системах. Регулирование скорости изменением частоты вверх от номинальной определяется прочностью обмотки ротора и потерями в стали магнитопровода 1,52Nном.
Регулирование скорости с изменением частоты вниз от основной осуществляется в диапазоне 1015. Нижний предел определяется неравномерным вращением асинхронного двигателя.. Общий диапазон регулирования 2030.
Если регулировать скорость при f=const, то регулирование идет при постоянно моментеМдоп=Мном.
Закон изменения напряжения при частотном регулировании скорости.
При частотном регулировании при выборе соотношения между напряжением и частотой, исходящего из условия сохранения перегрузочной способности машины на любой регулируемой механической характеристике
![]() ;
;![]() ;
; ;
;
А – коэффициент не зависит от напряжения и частоты.
Для любой частоты f1j и соответствующей ей скоростиwjперегрузочная способность будет равна
 ;
; ;
;![]() ;
; ;
;
 ;
;![]() .
.
Принимаем, что для fkноминальный режим
 - закон Костенка.
- закон Костенка.
Т.е. в этой формуле значение напряжения и момента сопротивления соответствует определенной частоте преобразования, а также видно, что напряжение определяется не только частотой, но и моментом сопротивления
![]() .
.
В теории электропривода различают три типа статических нагрузок.
1. Момент сопротивления не зависит от скорости Мс=const.
2. При регулировании
скорости мощность на валу двигателя
остается постоянной Рсн=const,![]() ;
; .
.
3. Регулирование
скорости происходит при идеализированной
вентильной нагрузке
![]() ;
;![]() .
.
Закон напряжения для данных нагрузок.
П
 ри
Мс=const.
ри
Мс=const.
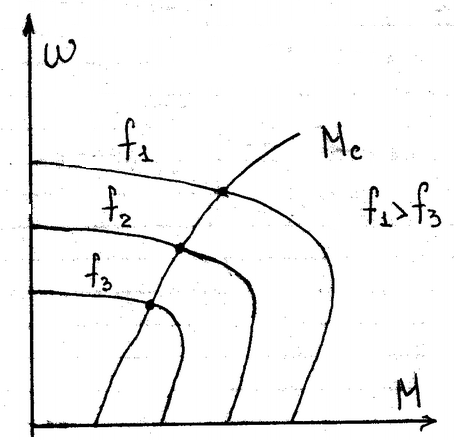
 ; f1f3;
; f1f3;
 ;
;![]() ;
;![]() .
.
 ;=;
;=;![]() .
.
При номинальной мощности.
 ;
; ;
;![]() ;
; .
.
Для вентилятора нагрузки.
 ;
; ;
;
 ;
;
 ;
;
![]() ;
;![]() .
.