

32. Разложение симметричных матриц. Метод квадр. Корней решения лин. Алг.Систем
Пусть A=[aij]n×n данная симметричная матрица aij=aji. Будем строить разложение матрицы А в виде А=UTU (1), где U- верхняя (правая) треугольная матрица. Равенство (1) перепишем в подробной форме:
 (2)
(2)
Перемножив (2) и учитывая симметричность матрицы А, получаем систему уравнений относительно неизвестных uij:
u112= a11 u12u11=a12 ……… u1nu11=a1n
u122+ u222=a22 …….. u1nu12+u2nu22=a2n (3)
. . . . . . . . . . . . . . . . . . . . . . .
u1n2+u2n2+…+unn2=ann
Cистему
(3) решаем следующим образом, в начале
находим элемент u11=
 ,
далее из остальной части 1-ой строки
находим
,
далее из остальной части 1-ой строки
находим .
.
Из
1-го ур. во 2-ой строке находим
 .
Из остальной части 2-ой строки находим:
.
Из остальной части 2-ой строки находим:
Продолжая,
последним находим элемент:

,
указанный процесс можно описать
следующими формулами:
 (4)
(4)
 (5)
(5)
При практическом счёте необходимо своевременно переключаться с формулы (4) на (5), и наоборот.
Замечание. Более универсально, чем разложение (1) явл. разложение эрмитовых матриц: А=U*ΔU, где Δ-диагональная матрица на главной диагонали, которой стоят числа ±1.
Замечание: Реализацию вычисления по формуле (4), (5) могут помешать 2 обстоятельства:
- отрицательное подкоренное выражение в (4);
- обращение в 0 знаменателя (5).
Однако, если матрица А симметрична, положительно определённая, то разложение (1) всегда осуществляеться тоже самое отномительно к матрицам с диагоналями преобладанием.
Применим разложение (1) к решению лин. алг. системы Ах=b (6) с симметрично положительно определённой матрицей А. В силу (1) имеем:
UTUx=b (7)
Перепишем
(7) в виде
 (8)
(8)
Очевидно, что решение подсистемы (8) не сложнее, чем обратный ход метода Гаусса.
33. Метод вращения решений лин. алг. систем
Предположим, что решение системы лин. алг. ур.
Ах=
b,
с матрицей
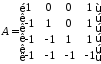
Прямой ход метода Гаусса даст следующую цепочку
Очевидно, что матрица такого типа размера n×n. После прямого хода метода Гаусса, допускает рост элементов до величены 2n-1, что при больших n приводит к сильному влияниюпогрешности округлений.
Рассмотрим метод вращений решения лин. алг. систем не допуская большого роста абсолютных велечин элементов матрицы системы. Пусть задана система:
 (1)
(1)
Возьмём 2 числа С1 и S1 умножим 1-ое ур. системы на С1 , 2-ое на S1. Полученные уравнения сложим и заменим этим уравнением 1-ое ур. системы, т.е. 1-ое ур. сист. будет иметь вид:
Далее 1-ое ур. сист. умножим на (-S1), а 2-ое умножим на С1, сложив, получим уравнения и заменим 2-ое ур. в 1, т.е. 2-ое ур. в 1 будет иметь вид:
Перейдём
к выбору чисел С1
и S1,
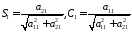
выберем их таким образом, чтобы
коэффициенты при х1
во 2-ом ур. получилась система =0, т.е.
чтобы выполнялось условие:

также
потребуем, чтобы имело место условие
нормировки:
 .
Тогда можно положить
.
Тогда можно положить
После указанного преобразования система (1) имеет вид:
 (2)
(2)
Заметим, что числа С1 и S1 можно трактовать, как sin и cos некоторого угла, поэтому очевидно, что переход от (1) к (2) представляет собой преобразование вращения с некоторой ортогональной матрицей.
Предположим преобразуем исходную систему, 1-ое и 3-ее ур. в (2) и проведя те же рассуждения. Исключим из 3-го ур. в (2) перемножая x1, далее берём 1-ое и 4-ое ур. получаем систему, 1-ое и 5-ое, и т.д. 1-ое и n-ое. Таким образом после указанных шагов система (2) преобразуется к виду:
 (3)
(3)
 (4)
(4)
Далее обрабатывая подсистему (4). Проведя аналогичные рассуждения для подсистемы (4) исключим неизвестную х2 из всех уравнений подсистемы (4) начинаю со 2-го и т.д. продолжаем указанный процесс до тех пор, пока система (3), (4) не будет иметь треугольную матрицу, т.е. не будет приведена к виду:
 (5)
(5)
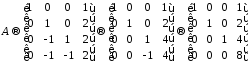
Теперь нахождение неизвестных из системы (5) аналогично обратному ходу метода Гаусса.
Преимущество этого метода заключается в том, что при переходе от системы (1) к системе (5) евклидова норма каждого столбца матрицы неизменяется. Действительно после 1-го шага имеем:
