4.Обратная матрица
Матрица
А-1 называется
обратной по отношению к матрице А, если
выполняется условие А-1*А=А*А-1=Е,
если определитель матрицы А отличен
от нуля, то существует единственная
обратная матрица А-1,
которая находится по формуле
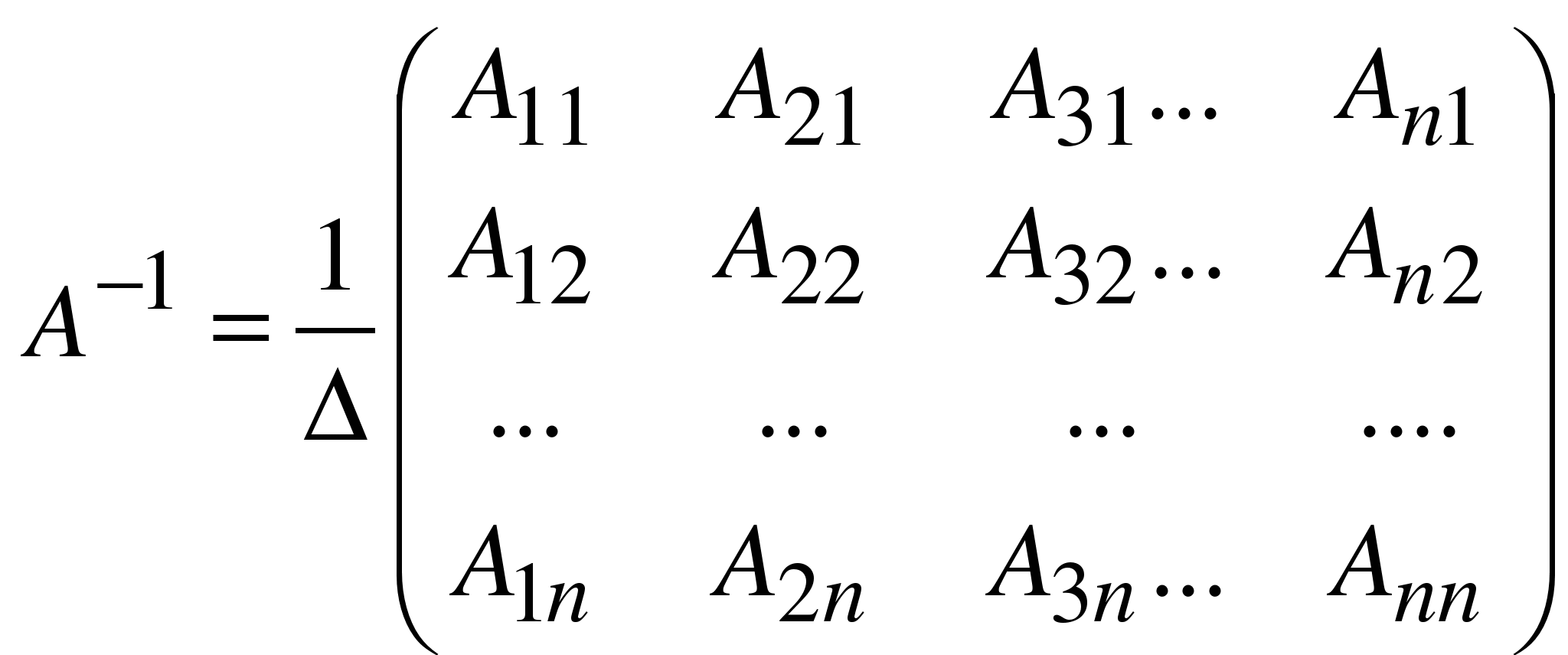 А*-союзная матрица, состоящая из алгебр
дополнений
А*-союзная матрица, состоящая из алгебр
дополнений
ТЕОРЕМА всякая невыраженная квадратная матрица А имеет обратную
Матрица, явл невыраженной, если ее определитель не равен нулю
Проверка А-1*А=Е
5.Решение систем линейных алгебраических уравнений по формуле крамера.
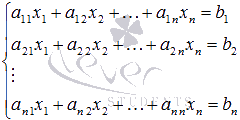 -
система m-линейных
уравнений с n
неизвестными х1
х2
х3 и
т д. если все свободные члены (b1
b2
b3)
равны нулю, то система называется
однородной
-
система m-линейных
уравнений с n
неизвестными х1
х2
х3 и
т д. если все свободные члены (b1
b2
b3)
равны нулю, то система называется
однородной
Если
определитель системы отличен от нуля,
то система совместна и имеет единственное
решение, которое находится по формуле
![]()

6.Решение систем линейных алгебраических уравнений матричным методом.
Если
определитель матрицы А отличен от нуля,
то система
 совместна и имеет единственное
совместна и имеет единственное
решение,
определяемое по формуле
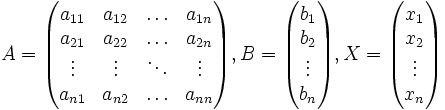 А*Х=В →Х=А-1*В
А*Х=В →Х=А-1*В
7.РЕШЕНИЕ СИСТЕМ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ МЕТОДОМ ГАУСА.
Рассмотри
систем
 m-линейных
матричных уравнений с n
неизвестными. Матрица, составленная
по этой системе, называется расширенной.
Элементарными преобразованиями матрицы,
называются след действия: 1. Переставление
строк или столбцов
m-линейных
матричных уравнений с n
неизвестными. Матрица, составленная
по этой системе, называется расширенной.
Элементарными преобразованиями матрицы,
называются след действия: 1. Переставление
строк или столбцов
2. умножение строки или столбца на число, отличное от нуля
3. деление строки на число без остатка
4. прибавление(вычитание) к элементам строки или столба соответствующих элементов другой
строки или столбца, предварительно умножив на некоторое число.
Метод Гауса заключается в приведении рассматриваемой матрицы к трапециевидному виду (на диагонали единицы, а ниже нули). С помощью элементарных преобразований, выполняемых над строками матрицы.
8.Линейные операции над векторами.
Свободный вектор а (т е такой вектор, который без изменений длины и направления может быть перенесен в любую сторону пространства) заданный в координатном пространстве (o, x, y, z) может быть представлен в виде a=axi+ayj+azk, такое представление, называется его разложение по ортам ax, ay, az –координаты вектора а, i, j, k – это орты или единичные вектора, длина которых обозначается |a|
|a|=√ ax2+ay2+az2
Направление вектора а определяется углами αβγ, образованными осями координат ox oy oz, косинусы этих углов, называются направляющими косинусами вектора а и опр по формулам cos α= аx/|a|, cosβ=ay/|a|,
cos γ=az/|a|
направляющие косинусы вектора связаны с соотношением cos2α+cos2β+cos2γ=1
суммой или разностью двух векторов а и b является a±b=(ax±bx)i+(ay±by)j+(az+bz)k произведением вектора а на число t определяется формулой a*t=(t*ax)i+(t*ay)j+(t*az)k
если вектор а и вектор параллельны м направлены в одну сторону и ту же сторону, то t›0 и наоборот.
Вектор, начало которого находится в начале координат, а конец в любой другой точке, называется радиус-вектором r=xi+yj+zk
Сложение и вычитание векторов
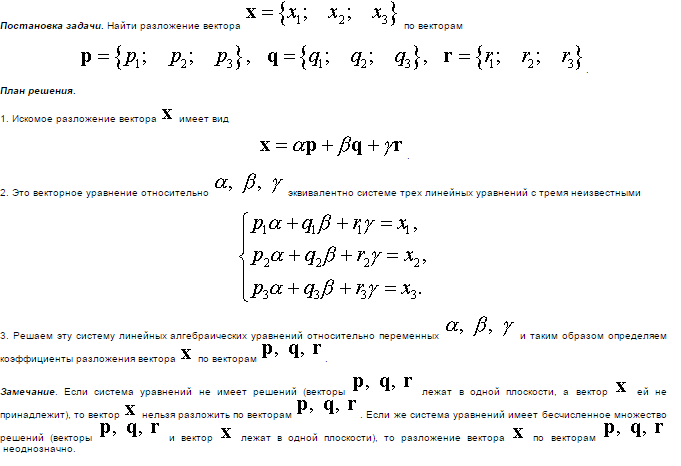
9.РАЗЛОЖЕНИЕ ВЕКТОРА ПО БАЗИСУ.
Базисом на прямой называется любой не нулевой вектор этой прямой. Базисом на плоскости называется 2 неколлинеарные вектора этой плоскости, взятые в определенном порядке. Базисом в пространстве называются любые 3 неколлинеарные векторы, взятые в определенном порядке.
Свойства: 1) Каждый вектор коллинеарный какой-либо прямой может быть разложен по базису на этой прямой. 2) Каждый вектор || плоскости может быть разложен по базису этой плоскости. 3) Каждый вектор может быть разложен по базису в R. Компоненты и координаты в каждом случае определяются однозначно.
Разложение
вектора по базису. Если дана упорядоченная
тройка векторов (a,b,c) некомпланарных
векторов, то для любого вектора p
существует единственная упорядоченная
тройка чисел (x,y,z), удовлетворяющая
равенству p=xa+yb+zc. Базисом называется
совокупность всех лин. независимых
векторов системы пространства.