

Вход 2 и выход 2 : положительный и отрицательный выводы обмотки возбуждения.
Input 3 : Load torque
Вход 3: момент нагрузки (внешний момент).
Output 3: Simulink measurement output [w la If Те ]
Выход 3: выход в Simulink (w Ia If Te)
Parameters
Параметры
Armature resistance and inductance [Ra (ohms) La (H) ]
Сопротивление и индуктивность обмотки якоря [Ra (Ом) La (Г) ]
Field resistance and inductance [Rf (ohms) Lf (H)
Сопротивление и индуктивность обмотки возбуждения [Rf (Ом) Lf (Г) ]
Field-armature mutual inductance Laf (H)
Взаимоиндуктивность обмоток Laf (H)
Total inertia J (kg.m"2)
Приведѐнный момент инерции J (кг м2)
Viscous friction coefficient Bm (N.m.s)
Коэффициент вязкого трения Bm (Н м с)
Coulomb friction torque Tf (N.m)
Момент сухого трения Tf (Н м)
Initial speed (rad/s)
Начальная скорость (рад/с)
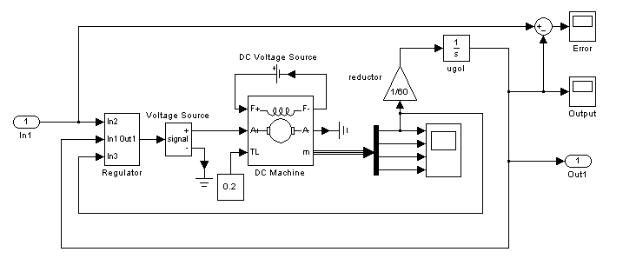
Включим этот мотор в схему следящего привода с ПИД – регулятором. Для его питания нам потребуются два источника напряжения – один постоянный (DC Voltage Source) для питания обмотки возбуждения, другой – управляемый (Voltage Source) для питания якорной обмотки. Последний имитирует усилитель мощности.
Порядок выполнения
Упражнение 1.
Для модели из Примера 1 составьте вручную систему дифференциальных уравнений в первой нормальной форме Коши и сравните полученные вручную матрицы с