

Пример 3
Рассмотрим нелинейную систему с той же шириной мѐртвой зоны, что и раньше – ±0.5.
Рассчитаем положение равновесия этой системы при входном сигнале 1. Нетрудно составить уравнение баланса:
X1 * |
3 |
0.5 X1, |
X1 0.4 |
|
2 |
||||
|
|
|
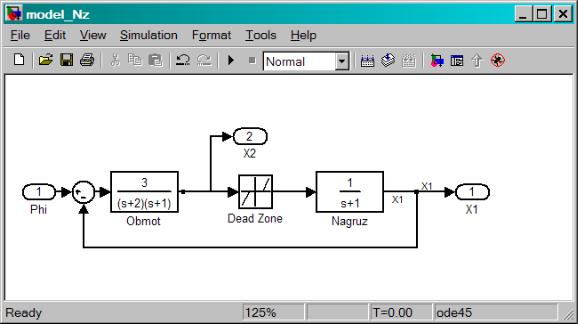
Нетрудно подсчитать значение второго выхода Х2=0.9. Теперь обратимся к функции trim. Эта функция численно, то есть приближѐнно, решает уравнения баланса, поэтому с одной стороны нуждается в начальном приближении, а с другой стороны может вообще не найти решения. Еѐ входными параметрами являются имя модели (строка), начальное приближение установившегося состояния x0 и значение входа u0. Выходными параметрами являются установившееся состояние, XS, значение водного сигнала US, установившиеся выходы системы YS, вектор производных состояния в установившейся точке DX. Этот последний вектор должен состоять из одних нулей, если установившееся состояние найдено верно, так что он служит признаком корректности решения.
>>x0 = [0; 0; 0];
>>u0 = 1;
>>[xs us ys dx]=trim('model_Nz',x0,u0)
Maximum number of function evaluations exceeded; increase OPTIONS(14)
xs = -0.0000 0.0000 0.2357
us =
1 ys =
-0.0000 0.5000
dx = 0.0000 0.6667 0.0000
>>
Как видно, попытка окончилась недачей, было превышено максимальное разрешѐнное количество итераций. Да и вектор производных далеко не нулевой. Остаѐтся или увеличить количество итераций, что редко помогает, или испытать другое начальное приближение.
>>x0 = [1; 0; 0];
>>[xs us ys dx]=trim('model_Nz',x0,u0) xs =
0.4000
0.0000
0.4243 us =
1 ys =
0.4000
0.9000 dx =
1.0e-025 *
0
0
0.3338
Вот теперь всѐ получилось, и значения выходов совпадают с нашими расчѐтами, и производные весьма близки к нулю (обратите внимание на общий множитель при векторе dx – 10-25). Не очень понятен вектор состояния, но так уж составил Matlab уравнения в пространстве состояний. Зато это состояние мы можем теперь использовать при линеаризации модели в окрестности установившегося состояния.
>> [A B C D]=linmod('model_Nz',xs,us) A =
-1.0000 -1.0000 0
B =
0
1.0000
0