

C = |
|
|
1.0000 |
0 |
0 |
0 |
0 |
2.1213 |
D = 0 0
>>
Примерно те же возможности, что описаны выше, предоставляются для работы с Simulink-схемой визуальным инструментом Linear Analysis (доступен через меню окна блок-схемы Simulink Tools=> Linear Analysis). Этот инструмент на самом-то деле совмещает в себе LTI Viewer и linmod. Только для него несколько иначе надо размечать Simulink-модель, вместо входных и выходных портов расставлять специальные метки – точки входа (Input Point) и точки выхода (Output Point).
Моделирование силовых электрических систем
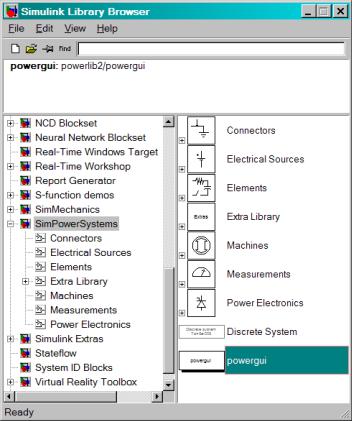
Для этой цели Simulink содержит специальный набор блоков (BlockSet) под названием SimPowerSystems.
В свою очередь он делится на группы: Connectors – соединения, коннекторы;
Electrical Sources – источники электрической энергии;
Elements – богатый набор элементов, включающий и длинные линии связи, и трансформаторы, и волногасители, и RLCцепи, и трѐхфазные шунты, нагрузки, линии и т.д.
Extra Library – библиотека расширений;
Machines – электрические машины (двигатели, генераторы…);
Measurements – измерители;
Power Electronics – силовая электроника (тиристоры, диоды, транзисторы высокой мощности);
Discrete System – дискретные системы;
Power GUI – графический интерфейс пользователя.
Большинство блоков из перечисленных наборов устроены не совсем так, как обычные блоки Simulink –модели (это в равной мере относится ко всем блокам так называемых "физических моделей" Simulink). Они предполагают на входе и выходе не просто числа, а размерные величины – ток, напряжение и т.д. Соединять эти блоки тоже можно не как попало, а по правилам электрических соединений, в частности, в обычной Simulink-схеме для передачи напряжения достаточно одной линии связи, а здесь, как в жизни, нужно две.
Сочетать с обычными Simulink-блоками такие модели можно только через специальных посредников (преобразователи) которые выступают в роли измерителей (Sensor) и преобразуют физические величины в числа, или актуаторов (Actuator), которые преобразуют числа в физические воздействия. В нашем случае это будут амперметр, вольтметр и управляемый источник питания.
Пример 4
Рассмотрим один только пример использования электрических силовых блоков
– модель электропривода постоянного тока.
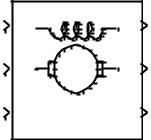
F+ |
F- |
A+ |
A- |
TL |
m |
DC Machine
Он представляет собой "чѐрный ящик", из которого выведены два конца обмотки подмагничивания (F+ и F-) и два конца обмотки якоря (А+ и А-). Эти выводы – электрические. К ним нельзя присоединять обычные Simulink-блоки. Вход TL – обычный числовой вход, на него подаѐтся сигнал, изображающий момент внешней нагрузки (load torque). Выход m – обычный векторный сигнал, содержит вектор состояния, включающий координаты: угловая скорость вала двигателя w, ток якоря Ia, ток обмотки подмагничивания If, электрический (развиваемый) момент двигателя Te.
Рассмотрим окно настроек этого блока (двойной щелчок):
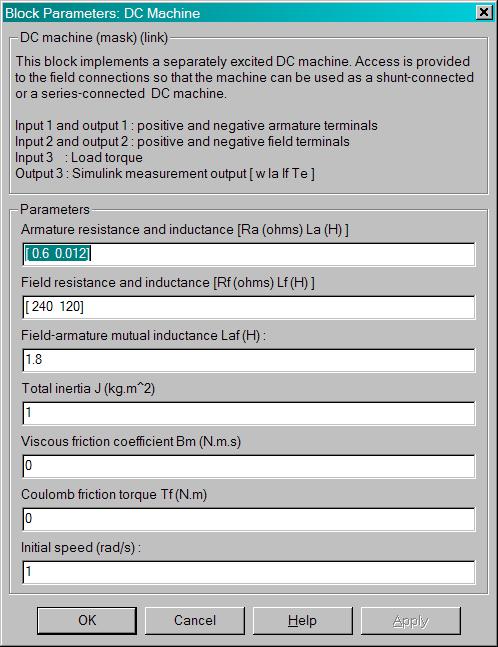
DC machine (mask) (link)— двигатель постоянного тока (маскированная подсистема).
This block implements a separately excited DC machine. Access is provided to the field connections so that the machine can be used as a shuntconnected or a series-connected DC machine.
Этот блок реализует электрическую машину постоянного тока с независимым возбуждением. Обеспечен доступ к обмотке возбуждения, что позволяет включать машину также по схеме параллельного или последовательного возбуждения.
Input 1 and output 1: positive and negative armature terminals
Вход 1 и выход 1 : положительный и отрицательный выводы обмотки
якоря
Input 2 and output 2: positive and negative field terminals